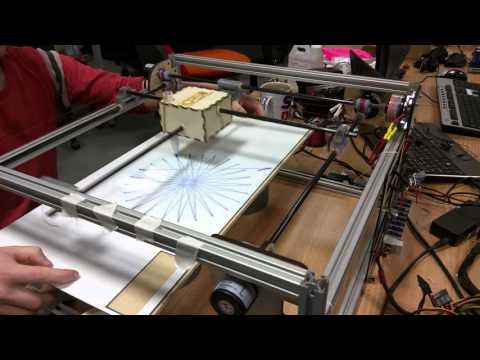
This project is all about accuratly driving brushless motors, for cheap. The aim is to make it possible to use inexpensive brushless motors in high performance robotics projects.
Like this (click for video):
If you want to get your hands on a board, check out this post.
This repository contains the circuit board design of ODrive. The other related repositories are:
- ODriveFirmware: Firmware that runs on the board.
- ODrive: Configuration and analysis scripts that runs on a PC.
There is also ODriveFPGA, which contains the FPGA logic and software that runs on the FPGA based ODrive. This is not currently in development, but may be resumed at some later date.
The pinout from the microcontroller to the board is documented here.

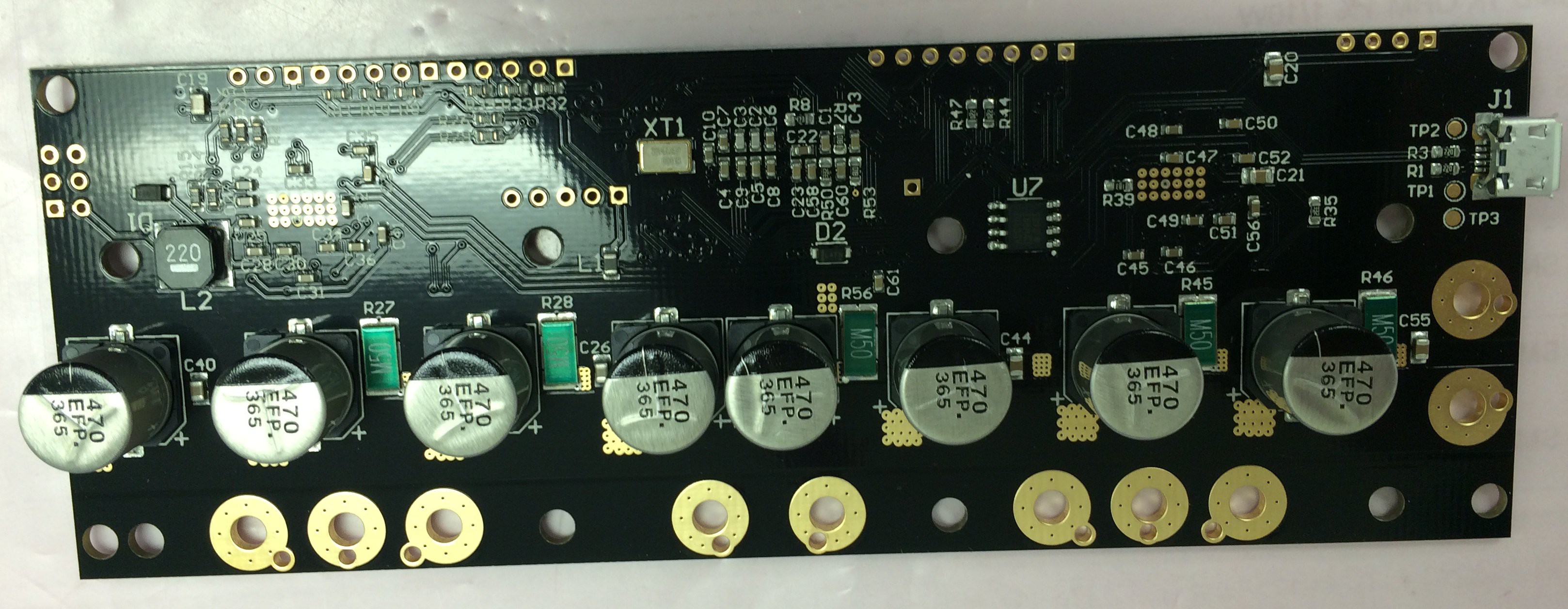
- The silkscreen labels for the encoders (M0, M1) are reversed.
- The output impedence of the current amplifiers were not considered when designing the post-amplifier filters. Hence the response is about 5x slower than designed. Max allowed modulation index is therefore about 50%.