 Image Credits: https://www.freelancer.com/contest/NASA-Space-ROS-Sim-Summer-Sprint-Challenge-2417552/details
Image Credits: https://www.freelancer.com/contest/NASA-Space-ROS-Sim-Summer-Sprint-Challenge-2417552/details
Team Lead Freelancer Username: SanjayJP02
Submission Title: CADRE Demo: Cooperative Autonomous Distributed Robotic Exploration

-
This package simulates NASA’s CADRE mission, which focuses on mapping the Moon through a trio of autonomous rovers. The simulation is developed using ROS 2 and is part of NASA's lunar exploration initiative for Spring 2026.
 Image Credits: https://www.jpl.nasa.gov/missions/cadre
Image Credits: https://www.jpl.nasa.gov/missions/cadre

- Lunar Landscape Design:
- Created a realistic lunar environment using Blender, based on publicly available lunar images from NASA’s gallery (https://science.nasa.gov/gallery/moon-images/).
- Configured world parameters such as gravity, atmosphere, and pressure using data from NASA’s planetary factsheet for gazebo (https://nssdc.gsfc.nasa.gov/planetary/factsheet/moonfact.html).

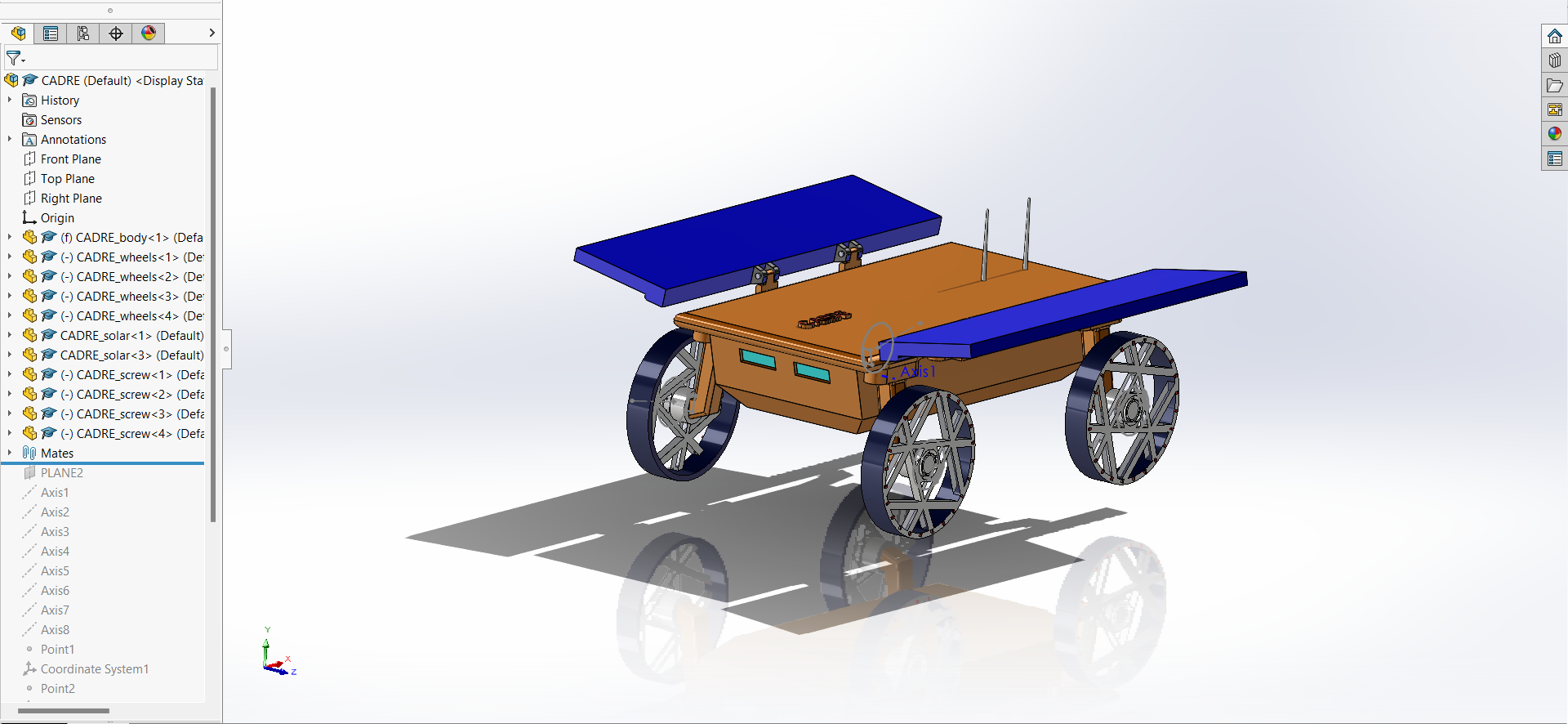
- CAD Model Development:
-
Constructed the CAD model of the CADRE rover from scratch using images and information from NASA JPL’s website (https://www.jpl.nasa.gov/missions/cadre).
-
Implemented the model in SolidWorks and converted it to URDF format for use with ROS2 Humble.

- Simulation and Integration:
-
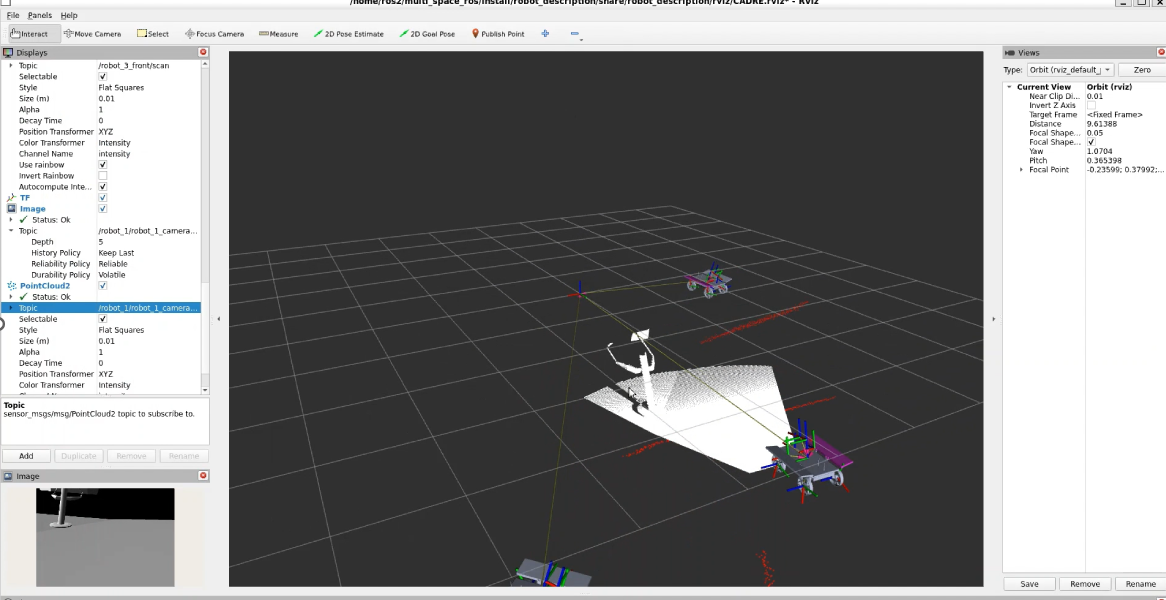
Integrated rover controls, IMU, LRF, and RGBD sensors for lunar mapping within the simulation.
-
Developed Python code to utilize point cloud data for mapping in relation to the Lander.

- Teleoperation and Control:
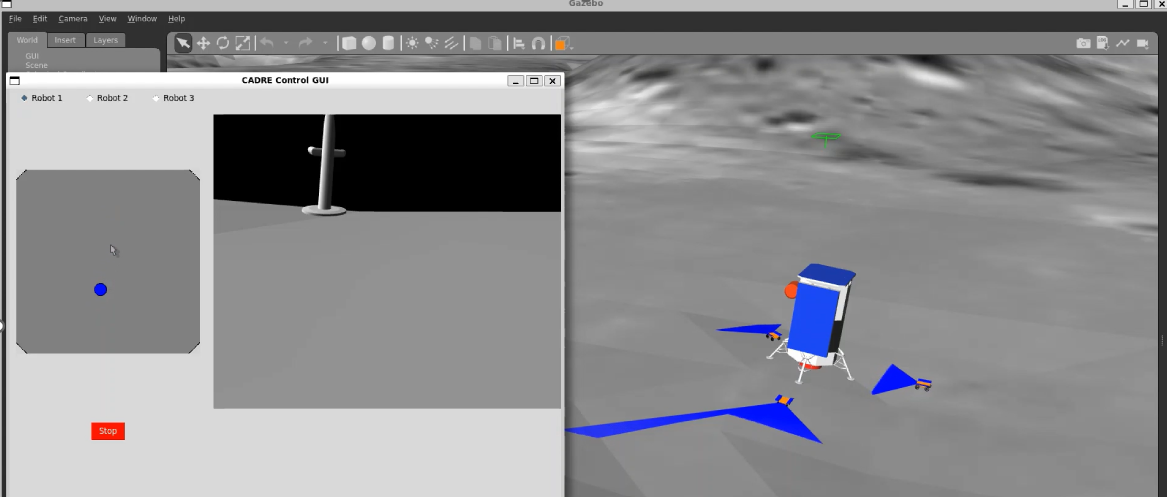
-
Created a Python GUI for teleoperation control of individual rovers, including camera visualization.
-
Set up ROS2 launch files to facilitate spawning multiple rovers as needed.

- Cross-Platform Compatibility:
- Tested the simulation on Windows Subsystem for Linux (WSL) and VMware Linux, ensuring compatibility for developers who wish to avoid dual boot or having access to a Linux environment.
- Open-sourced :
- Open-sourced SolidWorks CAD files and Blender files for additional changes. (https://github.com/Sanjay-j-p/demos/tree/main/CADRE_demo/CAD_and_Blender_files)
- Implementing reinforcement learning for coordinated mapping and exploration in Gazebo.
The CADRE rover topics:
- /clicked_point
- /clock
- /goal_pose
- /initialpose
- /parameter_events
- /performance_metrics
- /robot_1/cmd_vel
- /robot_1/joint_states
- /robot_1/odom
- /robot_1/robot_1_camera/camera_info
- /robot_1/robot_1_camera/depth/camera_info
- /robot_1/robot_1_camera/depth/image_raw
- /robot_1/robot_1_camera/depth/image_raw/compressed
- /robot_1/robot_1_camera/depth/image_raw/compressedDepth
- /robot_1/robot_1_camera/depth/image_raw/theora
- /robot_1/robot_1_camera/image_raw
- /robot_1/robot_1_camera/image_raw/compressed
- /robot_1/robot_1_camera/image_raw/compressedDepth
- /robot_1/robot_1_camera/image_raw/theora
- /robot_1/robot_1_camera/points
- /robot_1_front/scan
- /robot_1_imu/data
- /robot_1_robot_description
- /robot_2/cmd_vel
- /robot_2/joint_states
- /robot_2/odom
- /robot_2/robot_2_camera/camera_info
- /robot_2/robot_2_camera/depth/camera_info
- /robot_2/robot_2_camera/depth/image_raw
- /robot_2/robot_2_camera/depth/image_raw/compressed
- /robot_2/robot_2_camera/depth/image_raw/compressedDepth
- /robot_2/robot_2_camera/depth/image_raw/theora
- /robot_2/robot_2_camera/image_raw
- /robot_2/robot_2_camera/image_raw/compressed
- /robot_2/robot_2_camera/image_raw/compressedDepth
- /robot_2/robot_2_camera/image_raw/theora
- /robot_2/robot_2_camera/points
- /robot_2_front/scan
- /robot_2_imu/data
- /robot_2_robot_description
- /robot_3/cmd_vel
- /robot_3/joint_states
- /robot_3/odom
- /robot_3/robot_3_camera/camera_info
- /robot_3/robot_3_camera/depth/camera_info
- /robot_3/robot_3_camera/depth/image_raw
- /robot_3/robot_3_camera/depth/image_raw/compressed
- /robot_3/robot_3_camera/depth/image_raw/compressedDepth
- /robot_3/robot_3_camera/depth/image_raw/theora
- /robot_3/robot_3_camera/image_raw
- /robot_3/robot_3_camera/image_raw/compressed
- /robot_3/robot_3_camera/image_raw/compressedDepth
- /robot_3/robot_3_camera/image_raw/theora
- /robot_3/robot_3_camera/points
- /robot_3_front/scan
- /robot_3_imu/data
- /robot_3_robot_description
- /rosout
- /tf
- /tf_static
More Rovers can be added by using the following modification main.launch.xml:
'#' - numbers
Spawn coordinates[ x_,y_z_,roll_,pitch_yaw_]- location of the new rover
<include file="$(find-pkg-share robot_gazebo)/launch/spawn_with_control.launch.xml">
<arg name="robot_name" value="robot_#"/>
<arg name="robot_file" value="robot.xacro"/>
<arg name="x_spawn" value="0.0"/>
<arg name="y_spawn" value="0.0"/>
<arg name="z_spawn" value="0.0"/>
<arg name="roll_spawn" value="0.0"/>
<arg name="pitch_spawn" value="0.0"/>
<arg name="yaw_spawn" value="0.0"/>
</include>Follow these passages to build the docker image and start a docker container.
-
Clone this repository, Go inside the directory to demos\CADRE_demo
-
Run the build script
chmod +x build.sh
./build.sh
- Start the container by executing
docker run -it --entrypoint /bin/bash openrobotics/cadre_demo
- (optional) Additional terminals can be opened by executing
chmod +x open_cmd.sh
./open_cmd.sh
-
PLEASE MOVE THE MODELS [ Lunar and Luanr_lander ] to .gazebo/models in Home (https://github.com/Sanjay-j-p/simulation/tree/main/models)
-
Please modify the locations in the robot.xacro for stl files. Rviz2 as Bug for not detecing Find package xml so i had to use hard location. current"file:///home/ros2/multi_space_ros/src/robot_description/meshes/ .stl" ( https://github.com/Sanjay-j-p/demos/blob/main/CADRE_demo/robot_description/robot/robot.xacro)
- Source your ROS2 distribution.
source /opt/ros/${ROS_DISTRO}/setup.bash
- Build Your Workspace ex: CADRE_demo
cd ..
cd CADRE_demo/
colcon build --symlink-install
- Source your workspace.
source install/setup.bash
- Run the launch file.
ros2 launch robot_gazebo main.launch.xml
With this, will start the gazebo simulator and Rviz with the three CADRE rovers in the Lunar world.
In another terminal,
- Excutable Premmsion for python files.
chmod +x joy.py
chmod +x mapping.py
- Run
ros2 run robot_control joy.py
This will start GUI control for controlling individual Rovers.
In another terminal, run
ros2 run robot_control mapping.py
This will start the point cloud node and publishes tranformed depth topic.
Apache License 2.0