forked from rachillesf/stereoMagic
-
Notifications
You must be signed in to change notification settings - Fork 0
pullitdown/stereoMagic
Folders and files
| Name | Name | Last commit message | Last commit date | |
|---|---|---|---|---|
Repository files navigation


About
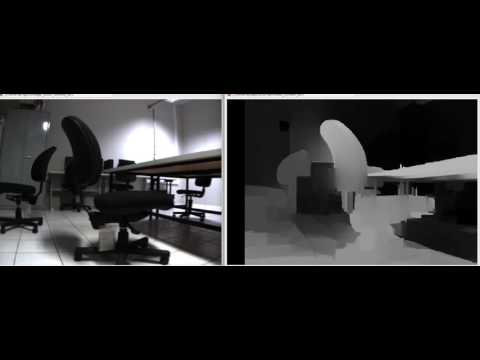
A ROS Package for Stereo Matching and Point Cloud Generation
Resources
Stars
Watchers
Forks
Releases
No releases published
Packages 0
No packages published
Languages
- C++ 78.3%
- Python 18.7%
- CMake 3.0%