
在建图的基础上,实现全局初始化,需要知道定位初始时刻相对于所建地图原点的位姿。所建地图原点为Mapping时InitOriginPosition的GPS位置,将这个GPS位置保存下来,在Matching时,以这个GPS位置为原点将后续的GNSS数据转换到LocalENU坐标系下,再在Matching时使用SetGNSSPose设置初始位姿并加载局部地图进行匹配完成任意位置初始化过程。
-
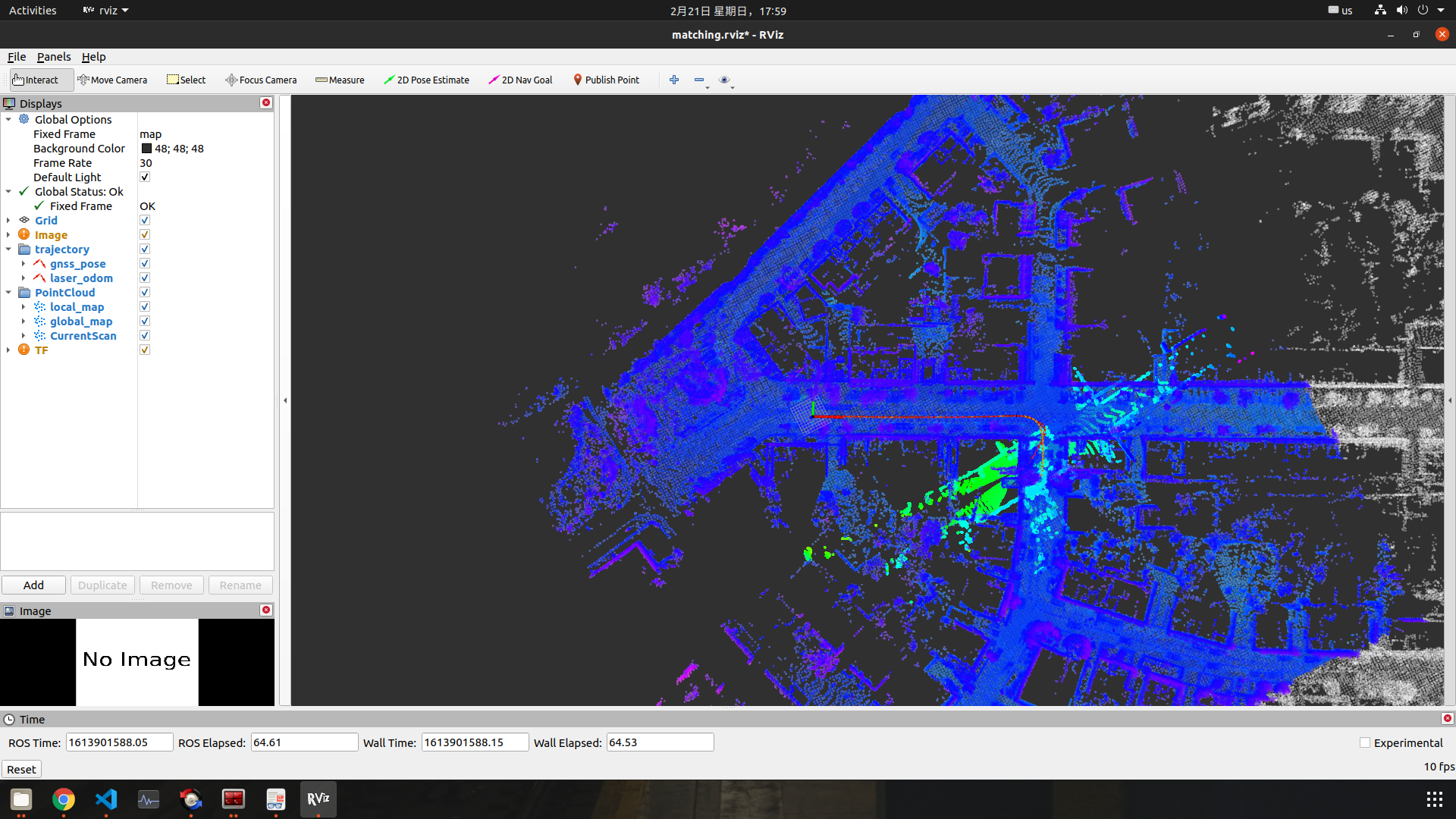
地图原点初始化
-
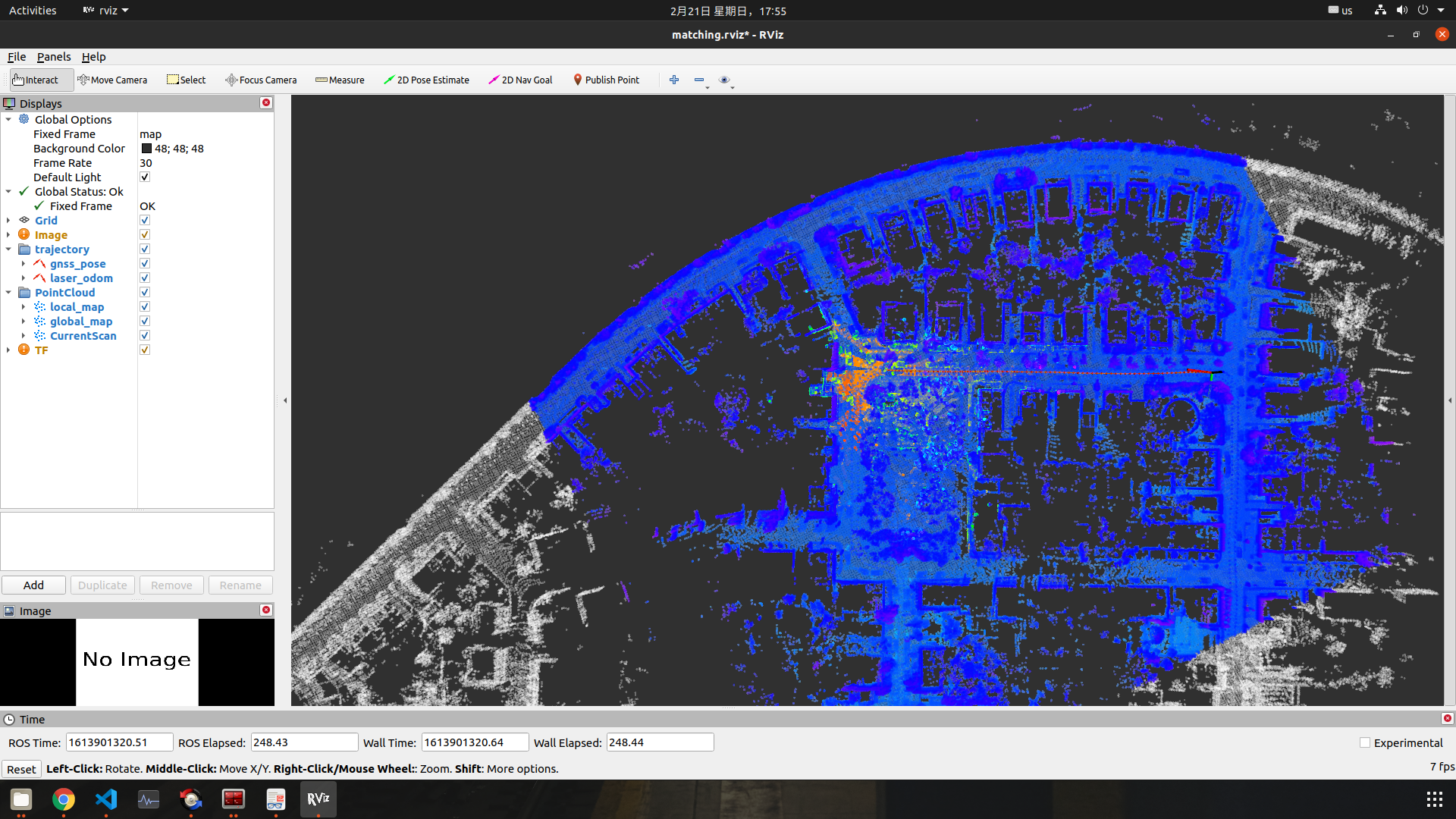
100S时初始化
-
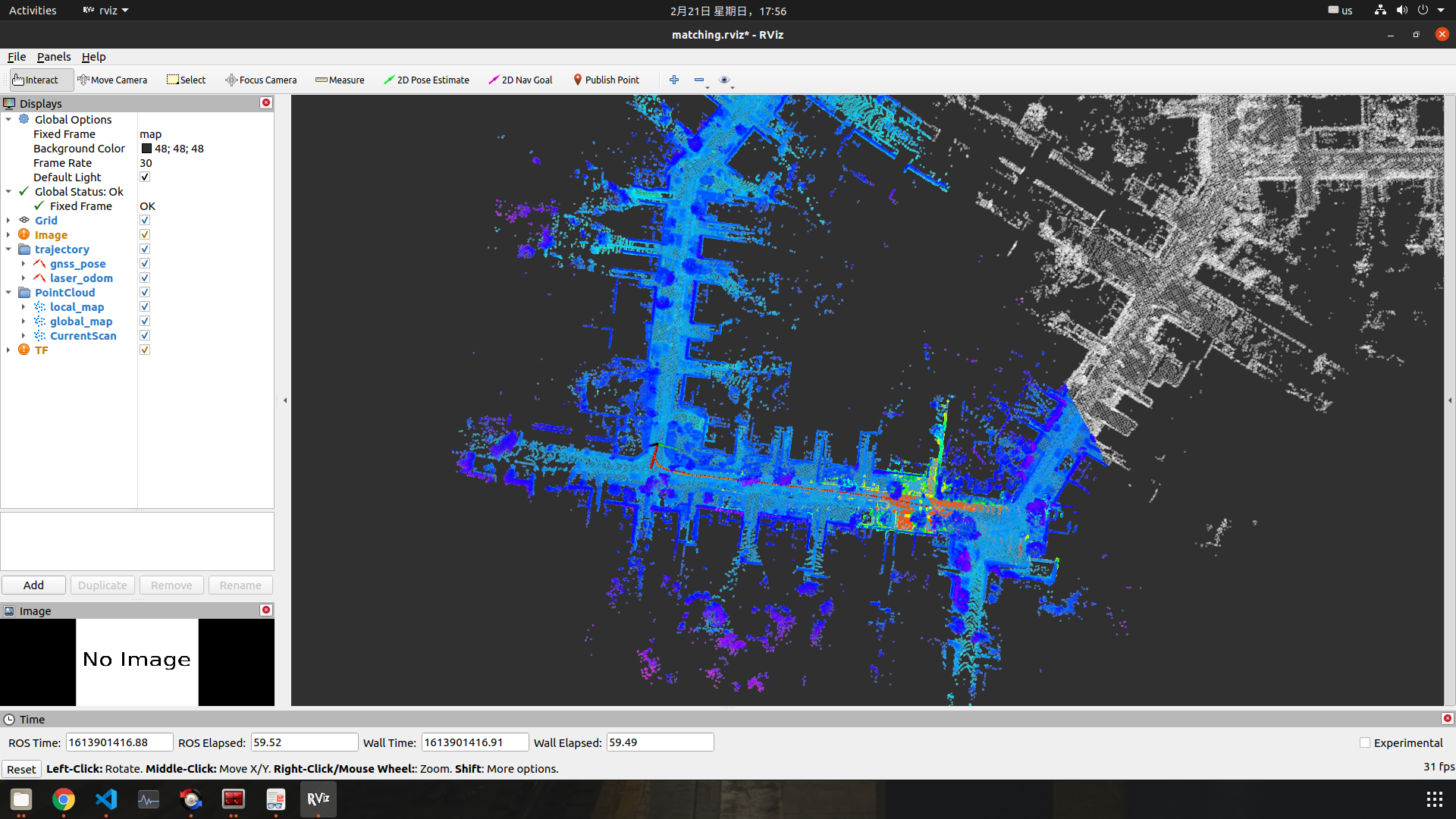
200S时初始化
-
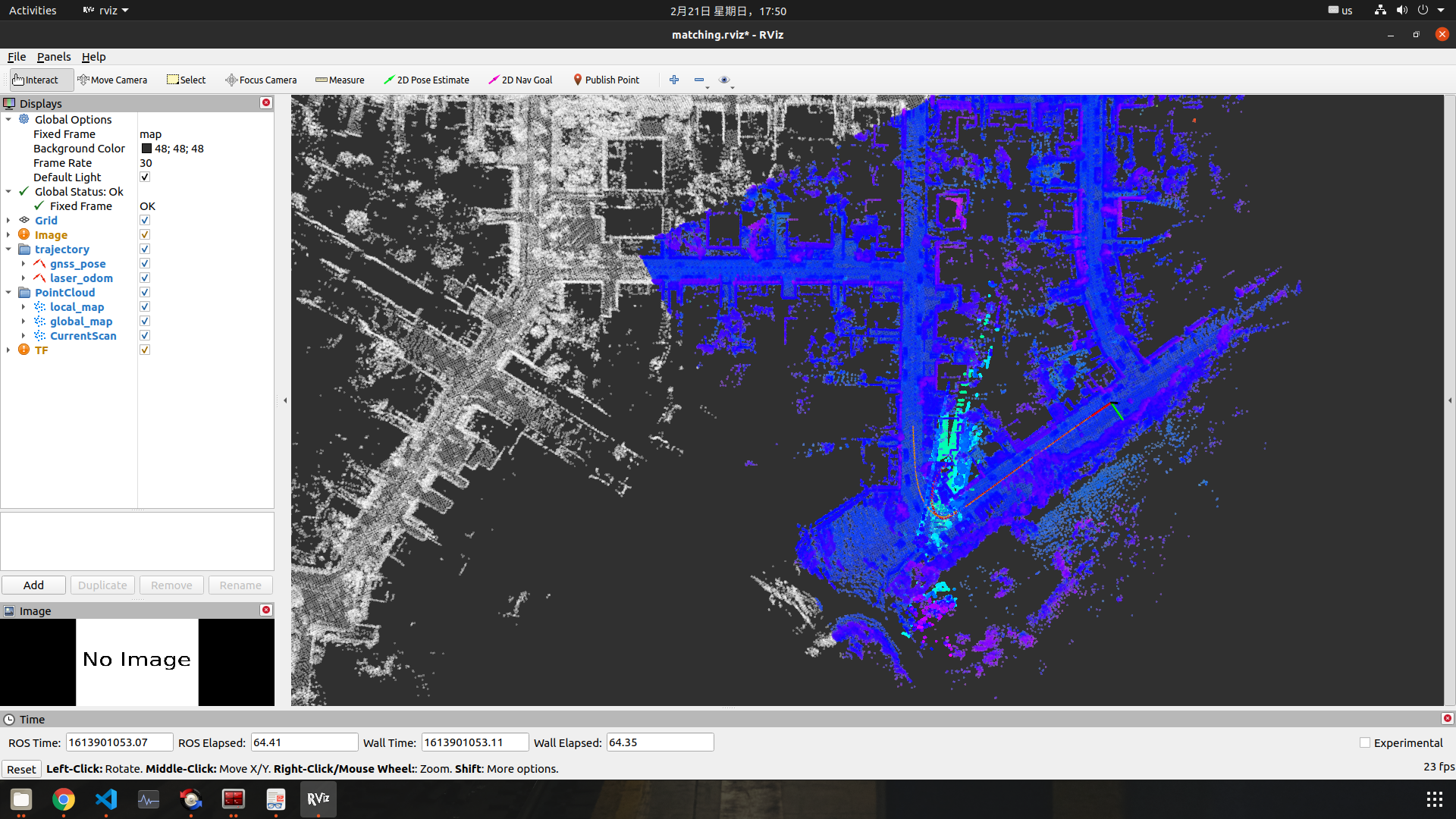
300S时初始化
-
400S时初始化
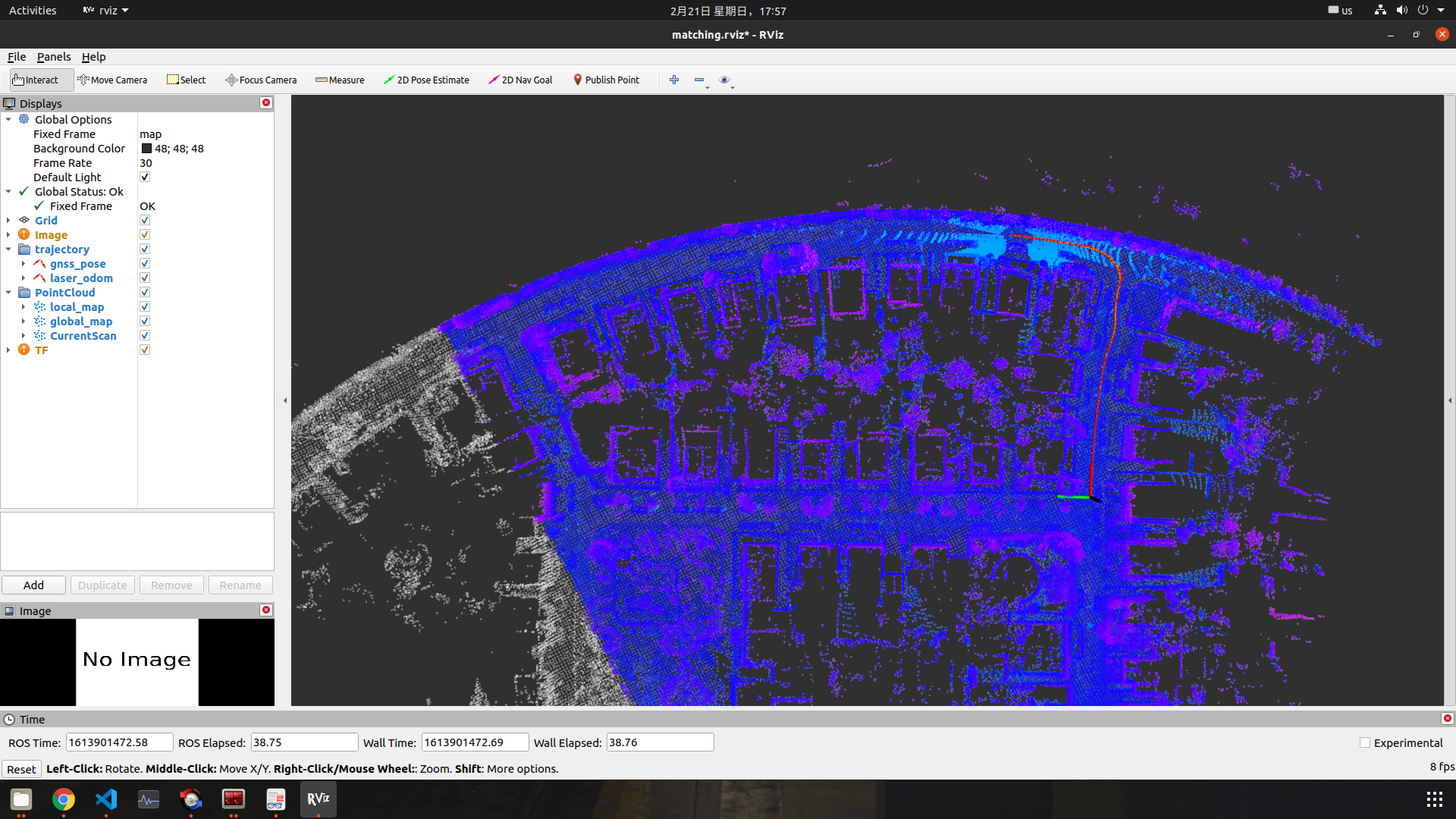





过程中发现全局初始化成功,运行一段时间后,基于地图的定位会不准,尤其是在转弯的地方,问题还在排查中。