从零制作自主空中机器人
本文档是视频教程从零制作自主空中机器人的配套文档,github链接为https://github.com/ZJU-FAST-Lab/Fast-Drone-250
安全事项
四旋翼无人机具有较高的安全风险,请同学们严格遵守安全规范,不要在有人的室内或室外进行试验,对自己和他人的安全负责,本实验室完全免责。
- 第一章:课程介绍
- 第二章:动力套焊接
- 第三章:飞控的安装与接线
- 第四章:飞控设置与试飞
- 第五章:机载电脑与传感器的安装
- 第六章:Ubuntu20.04的安装
- 第七章:机载电脑的环境配置
- 第八章:常用实验与调试软件的安装与使用
- 第九章:Ego-Planner代码框架与参数介绍
- 第十章:VINS的参数设置与外参标定
- 第十一章:Ego-Planner的实验
- Q&A 常见问题及解答
本次课程是一套面向对自主空中机器人感兴趣的学生、爱好者、相关从业人员的免费课程,包含了从硬件组装、机载电脑环境设置、代码部署、实机实验等全套详细流程,带你从0开始,组装属于自己的自主无人机,并让它可以在未知的环境中自由避障穿行。本次课程所涉及的所有代码、硬件设计全部开源,严禁商用与转载,版权与最终解释权由浙江大学FASTLAB实验室所有。 本次课程的重心主要落在自主空中机器人的搭建、代码部署及调试上,关于自主空中机器人的一些理论基础,例如动力学模型,路径搜索,轨迹规划,地图构建等内容,高飞老师在深蓝学院有非常详尽而深入浅出的课程,本次课程就不再赘述。
机器人本体相关配件及焊接用工具详见purchase_list.xlsx,对硬件选型有相关疑问请看 番外一:硬件选型
- 一定要注意电调信号线顺序!!!
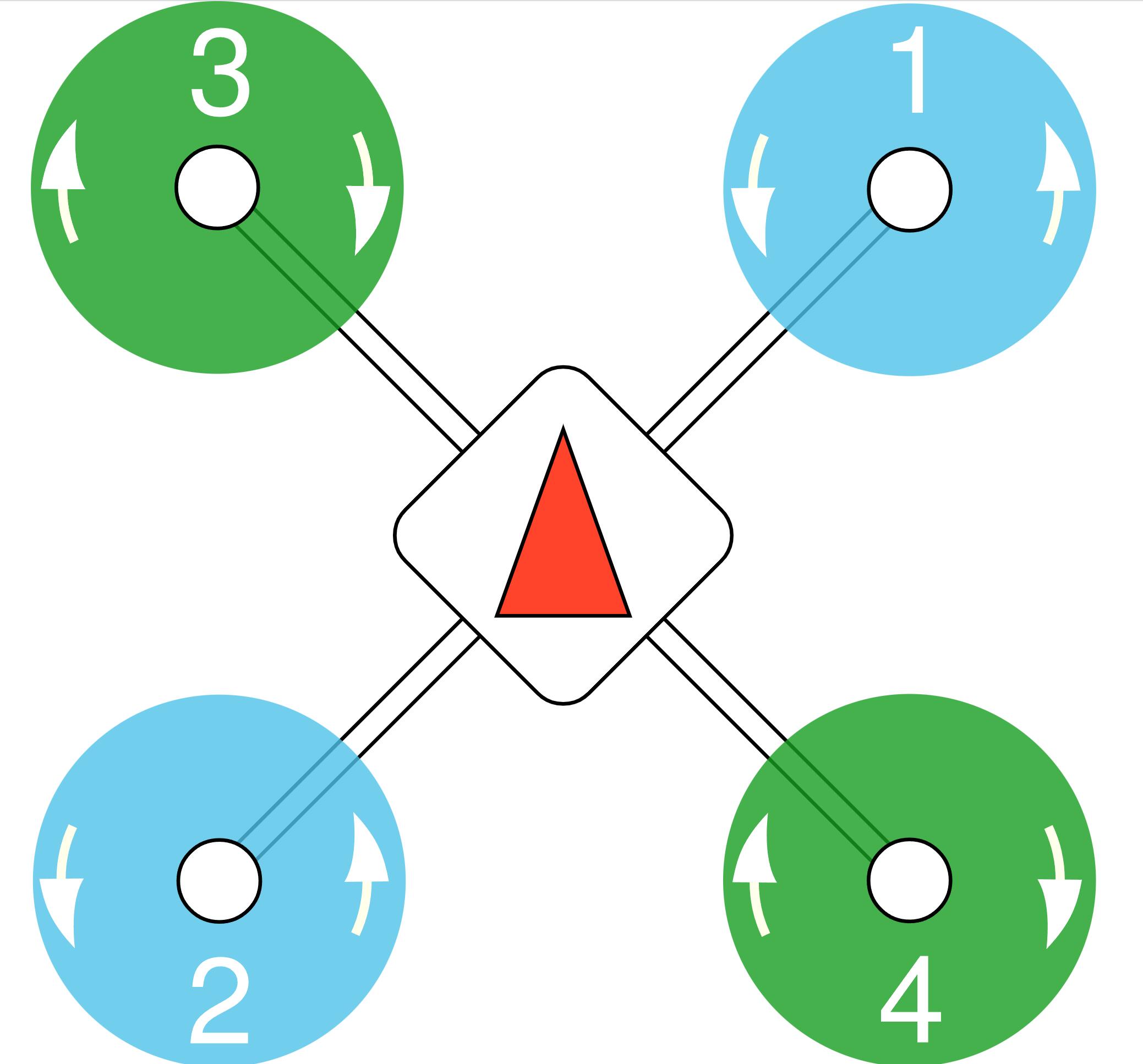
- 飞控箭头与机头同向为正向,任意方向旋转90°的倍数也可以,后续可以在飞控设置内调整,推荐和视频内相同朝向摆放。
- 强烈推荐使用硅胶杜邦线,常规杜邦线线材过硬,容易出现接触不良。
- 5V稳压模块注意贴黑胶带绝缘,周围注意贴一圈厚的海绵胶带来防止飞机降落时损坏5V模块,也可以考虑把5V模块用扎带扎在机臂旁边
- 使用V5+飞控或其他把模拟和数字输出分开的飞控(特点是输出口标号为A1
A4 M1M4),如果要用Dshot协议,请插在A口上

-
请烧录本git项目下的
/firmware/px4_fmu-v5_default.px4固件,这个固件是官方1.11.0版本固件编译而来,如有需要可以自行编译。实测1.13版本固件存在BUG,不建议使用,更老的固件版本未经测试。 -
在飞控的sd卡的根目录下创建
/etc/extras.txt,写入mavlink stream -d /dev/ttyACM0 -s ATTITUDE_QUATERNION -r 200 mavlink stream -d /dev/ttyACM0 -s HIGHRES_IMU -r 200以提高imu发布频率
-
修改机架类型为
Generic 250 Racer,代指250mm轴距机型。如果是其他尺寸的机架,请根据实际轴距选择机架类型 -
修改
dshot_config为dshot600 -
修改
CBRK_SUPPLY_CHK为894281 执行这步跳过了电源检查,因此左侧栏的电池设置部分就算是红的也没关系 -
修改
CBRK_USB_CHK为197848 -
修改
CBRK_IO_SAFETY为22027 -
修改
SER_TEL1_BAUD为921600 -
修改
SYS_USE_IO为0(搜索不到则不用管) -
上电前请先用万用表通断档检测电源正负焊点是否短接,强烈建议第一次上电前先接一个短路保护器
-
检测电机转向前确保没有安装螺旋桨!!!!
-
修改电机转向:进入mavlink控制台
dshot reverse -m 1 dshot save -m 1修改
1为需要反向的电机序号 -
第一次试飞请务必找有自稳模式下飞行经验的飞手协助,只飞过大疆无人机的飞手99%无法飞好!
-
身边没有有经验的飞手怎么办?详见Q&A
- 碳板已经预留了拆壳NUC的安装空位。如果想拆壳安装NUC,需要额外购买USB网卡,或者拆下自带的网卡天线找地方固定住,并且由于碳纤维板导电,请务必用尼龙柱把NUC支起来,相关资料请自行查阅。
- 机载电脑使用4S航模电池直接供电,正常情况下没有问题。但理论上最好接一个稳压模块,否则在无人机炸机/电池几乎耗尽时会出现机载电脑关机的情况。但由于符合NUC功率的稳压模块比较大,请同学们酌情选用。
- 镜像站地址:
http://mirrors.aliyun.com/ubuntu-releases/20.04/下载ubuntu-20.04.4-desktop-amd64.iso - 烧录软件UltraISO官网:
https://cn.ultraiso.net/ - 分区设置:
- EFI系统分区(主分区)512M
- 交换空间(逻辑分区)16000M(内存大小的两倍)
- 挂载点
/(主分区)剩余所有容量 - 笔记本上也需要安装ubuntu,推荐装20.04版本。虚拟机或双系统都可以,如果有长期学习打算推荐双系统
- ROS安装
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654sudo apt updatesudo apt install ros-noetic-desktop-fullecho "source /opt/ros/noetic/setup.bash" >> ~/.bashrc- 建议没有ROS基础的同学先去B站学习古月老师的ROS入门教程
- 测试ROS
- 打开三个终端,分别输入
roscorerosrun turtlesim turtlesim_noderosrun turtlesim turtle_teleop_key
- realsense驱动安装
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDEsudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -usudo apt-get install librealsense2-dkmssudo apt-get install librealsense2-utilssudo apt-get install librealsense2-devsudo apt-get install librealsense2-dbg- 测试:
realsense-viewer - 注意测试时左上角显示的USB必须是3.x,如果是2.x,可能是USB线是2.0的,或者插在了2.0的USB口上(3.0的线和口都是蓝色的)
- 安装mavros
sudo apt-get install ros-noetic-mavroscd /opt/ros/noetic/lib/mavrossudo ./install_geographiclib_datasets.sh
- 安装ceres与glog与ddyanmic-reconfigure
- 解压
3rd_party.zip压缩包 - 进入glog文件夹打开终端
./autogen.sh && ./configure && make && sudo make installsudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3.1.2 libgflags-dev libgoogle-glog-dev libgtest-dev- 进入ceres文件夹打开终端
mkdir buildcd buildcmake ..sudo make -j4sudo make installsudo apt-get install ros-noetic-ddynamic-reconfigure
- 解压
- 下载ego-planner源码并编译
git clone https://github.com/ZJU-FAST-Lab/Fast-Drone-250cd Fast-Drone-250catkin_makesource devel/setup.bashroslaunch ego_planner single_run_in_sim.launch- 在Rviz内按下键盘G键,再单击鼠标左键以点选无人机目标点
- VScode:
sudo dpkg -i ***.deb - Terminator:
sudo apt install terminator - Plotjuggler:
sudo apt install ros-noetic-plotjugglersudo apt install ros-noetic-plotjuggler-rosrosrun plotjuggler plotjuggler
- Net-tools:
sudo apt install net-toolsifconfig
- ssh:
sudo apt install openssh-server- 在笔记本上:
ping 192.168.**.** sudo gedit /etc/hosts- 加上一行:
192.168.**.** fast-drone ping fast-dronessh fast-drone@fast-drone(ssh 用户名@别名)
src/planner/plan_manage/launch/single_run_in_exp.launch下的:map_size:当你的地图大小较大时需要修改,注意目标点不要超过map_size/2fx/fy/cx/cy:修改为你的深度相机的实际内参(下一课有讲怎么看)max_vel/max_acc:修改以调整最大速度、加速度。速度建议先用0.5试飞,最大不要超过2.5,加速度不要超过6flight_type:1代表rviz选点模式,2代表waypoints跟踪模式
src/planner/plan_manage/launch/advanced_param_exp.xml下的:resolution:代表栅格地图格点的分辨率,单位为米。越小则地图越精细,但越占内存。最小不要低于0.1obstacles_inflation:代表障碍物膨胀大小,单位为米。建议至少设置为飞机半径(包括螺旋桨、桨保)的1.5倍以上,但不要超过resolution的4倍。如果飞机轴距较大,请相应改大resolution
src/realflight_modules/px4ctrl/config/ctrl_param_fpv.yaml下的:mass:修改为无人机的实际重量hover_percent:修改为无人机的悬停油门,可以通过px4log查看,具体可以参考文档 如果你的无人机是和课程的一模一样的话,这项保持为0.3即可。如果更改了动力配置,或重量发生变化,或轴距发生变化,都请调整此项,否则自动起飞时会发生无法起飞或者超调严重的情况。gain/Kp,Kv:即PID中的PI项,一般不用太大改动。如果发生超调,请适当调小。如果无人机响应较慢,请适当调大。rc_reverse:这项使用乐迪AT9S的不用管。如果在第十一课的自动起飞中,发现飞机的飞行方向与摇杆方向相反,说明需要修改此项,把相反的通道对应的值改为true。其中throttle如果反了,实际实验中会比较危险,建议在起飞前就确认好,步骤为:roslaunch mavros px4.launchrostopic echo /mavros/rc/in- 打开遥控器,把遥控器油门从最低满满打到最高
- 看echo出来的消息里哪项在缓慢变化(这项就是油门通道值),并观察它是不是由小变大
- 如果是由小变大,则不需要修改throttle的rc_reverse,反之改为true
- 其他通道同理
-
检查飞控mavros连接正常
ls /dev/tty*,确认飞控的串口连接正常。一般是/dev/ttyACM0sudo chmod 777 /dev/ttyACM0,为串口附加权限roslaunch mavros px4.launchrostopic hz /mavros/imu/data_raw,确认飞控传输的imu频率在200hz左右
-
检查realsense驱动正常
roslaunch realsense2_camera rs_camera.launch- 进入远程桌面,
rqt_image_view - 查看
/camera/infra1/image_rect_raw,/camera/infra2/image_rect_raw,/camera/depth/image_rect_raw话题正常
-
VINS参数设置
-
进入
realflight_modules/VINS_Fusion/config/ -
驱动realsense后,
rostopic echo /camera/infra1/camera_info,把其中的K矩阵中的fx,fy,cx,cy填入left.yaml和right.yaml -
在home目录创建
vins_output文件夹(如果你的用户名不是fast-drone,需要修改config内的vins_out_path为你实际创建的文件夹的绝对路径) -
修改
fast-drone-250.yaml的body_T_cam0和body_T_cam1的data矩阵的第四列为你的无人机上的相机相对于飞控的实际外参,单位为米,顺序为x/y/z,第四项是1,不用改
-
-
VINS外参精确自标定
sh shfiles/rspx4.shrostopic echo /vins_fusion/imu_propagate- 拿起飞机沿着场地尽量缓慢地行走,场地内光照变化不要太大,灯光不要太暗,不要使用会频闪的光源,尽量多放些杂物来增加VINS用于匹配的特征点
- 把
vins_output/extrinsic_parameter.txt里的内容替换到fast-drone-250.yaml的body_T_cam0和body_T_cam1 - 重复上述操作直到走几圈后VINS的里程计数据偏差收敛到满意值(一般在0.3米内)
-
建图模块验证
sh shfiles/rspx4.shroslaunch ego_planner single_run_in_exp.launch- 进入远程桌面
roslaunch ego_planner rviz.launch
-
自动起飞:
sh shfiles/rspx4.shrostopic echo /vins_fusion/imu_propagate- 拿起飞机进行缓慢的小范围晃动,放回原地后确认没有太大误差
- 遥控器5通道拨到内侧,六通道拨到下侧,油门打到中位
roslaunch px4ctrl run_ctrl.launchsh shfiles/takeoff.sh,如果飞机螺旋桨开始旋转,但无法起飞,说明hover_percent参数过小;如果飞机有明显飞过1米高,再下降的样子,说明hover_percent参数过大- 遥控器此时可以以类似大疆飞机的操作逻辑对无人机进行位置控制
- 降落时把油门打到最低,等无人机降到地上后,把5通道拨到中间,左手杆打到左下角上锁
-
Ego-Planner实验
- 自动起飞
roslaunch ego_planner single_run_in_exp.launchsh shfiles/record.sh- 进入远程桌面
roslaunch ego_planner rviz.launch - 按下G键加鼠标左键点选目标点使无人机飞行
-
如果实验中遇到意外怎么办!!!
case 1: VINS定位没有飘,但是规划不及时/建图不准确导致无人机规划出一条可能撞进障碍物的轨迹。如果飞手在飞机飞行过程中发现无人机可能会撞到障碍物,在撞上前把6通道拨回上侧,此时无人机会退出轨迹跟随模式,进入VINS悬停模式,在此时把无人机安全着陆即可case 2:VINS定位飘了,表现为飞机大幅度颤抖/明显没有沿着正常轨迹走/快速上升/快速下降等等,此时拨6通道已经无济于事,必须把5通道拨回中位,使无人机完全退出程序控制,回到遥控器的stablized模式来操控降落case 3:无人机已经撞到障碍物,并且还没掉到地上。此时先拨6通道,看看飞机能不能稳住,稳不住就拨5通道手动降落case 4:无人机撞到障碍物并且炸到地上了:拨5通道立刻上锁,减少财产损失case 5:绝招 反应不过来哪种case,或者飞机冲着非常危险的区域飞了,直接拨7通道紧急停桨。这样飞机会直接失去动力摔下来,对飞机机身破坏比较大,一般慢速情况下不建议。
Q: 能不能用265+435来不跑vins?
A: 可以,但265直出的里程计的速度估计有问题,可能导致控制不稳定。需要把265和imu做ekf融合。
Q: 硬件清单中的xxx能不能更换?
A: 请看视频番外一,讲解了大部分替换可能。
如果要换大轴距机架,请相应更换动力套及桨叶。pid参数也需要相应调整,相关内容自行查阅。
435相机可以换430相机。430更便宜但没有外壳,不好固定且容易炸坏。
电池不建议更换,因为课程的Q250机架刚刚好可以塞入2300mah 4S电池,不需要额外固定。更换电池需要自行解决电池放置问题。
Q: 能不能用D435i自带的imu运行vins?
A: 不行,因为435的imu噪声很大
Q: 课程提供的v1.11.0固件有什么改动吗?必须使用这个固件吗?
A: 没有任何改动,是直接从px4官方下载的。目前仅在该版本上测试通过了本套代码,且在v1.13上测试失败,表现为VINS会经常崩溃。其他飞控/其他版本固件没有测试,有需要的同学可以自行测试。
Q: QGC内测试电机不转怎么办?
A: 1. 检查电调是否支持dshot,不支持请自行查阅pwm电调校准方法。
2.如果是使用V5+飞控或其他把模拟和数字输出分开的飞控(特点是输出口标号为A1~A4 M1~M4),如果要用Dshot协议,请插在A口上
3.使用holybro pixhawk4完全版飞控,飞控与分电板的插线请插在FMU PWM OUTPUT上,而非I/O PWM OUTPUT
Q: 运行vins后报红字错误?
A: 大概率是你改config后格式错误,照着报错去修改对应的config
Q: 运行vins后报"VINS_RESULT_PATH not opened"?
A: 在home目录创建`vins_output`文件夹(如果你的用户名不是fast-drone,需要修改config内的vins_out_path为你实际创建的文件夹的绝对路径)
Q: 这台飞机的载重有多少?续航有多少?能飞多远?
A: 不带额外负载起飞重量在1.1~1.2kg左右,最大起飞重量在1.8kg内,再大控制不稳且续航很短。
不带负载续航约5分钟。
能飞多远取决于你wifi的通讯质量,一般wifi顶多通讯100米。此外由于栅格地图直接开在内存内,如果地图范围设置过大,容易占满内存导致其他程序运行缓慢。一般不建议超过50米*50米。
Q: 为什么要挡住D435的结构光?
A: 结构光的意义在于使相机得到的深度图更准确,但双目图片上会显示出位置固定不变的点阵光斑,这对VIO的运行是不利的,所以需要关掉。
Q: VINS飘怎么办?
A: 1. 检查环境中是否有强反光物体(瓷砖、玻璃等)
2. 尽量缓慢地移动无人机,场景内不要有运动物体
3. 尽量准确地测量初始外参
4. 不要在运行vins的时候在远程桌面上运行rviz(会占用大量CPU资源),实在想开建议去配一下ROS多机,然后在笔记本上开
5. 检查环境中是否有频闪光源(肉眼无法看出,在realsense的单目画面中检查)
Q: 我没有自稳模式无人机的飞行经验,身边也没有有经验的飞手,怎么办呢?
A: 1. 有预算的情况下,建议购买一台耐摔的带保护圈的穿越机来练手,推荐的型号有mobula6,吉朗小金鱼85x,化骨龙racewhoop30等
2. 没啥预算的情况下,建议购买一个遥控器加密狗来把课程推荐的AT9S遥控器连接到电脑,然后在模拟器里练熟。模拟器推荐steam上的liftoff,免费的推荐free rider
Q: 我想用NX做机载电脑,该另外做些什么?
A: 原则上不建议小白用NX,会多很多麻烦事,本课程并不涉及,助教也没有时间去帮你看。
需要额外做下面的事:
1. 修改VINS为GPU版本的,因为NX的CPU算力很差,跑课程的CPU版VINS一定跑不动
2. 解决NX固定及供电问题
3. 解决realsense固定问题
4. 解决NX用小底板时接口不够的问题
5. 解决一系列arm和x86不兼容带来的问题
Q: 我按照教程修改sd卡里的etc/extra.txt后,IMU频率没有变成200hz怎么办?
A: 可能原因是你的固件不支持这样修改,可以尝试在启动mavros后执行:
rosrun mavros mavcmd long 511 105 5000 0 0 0 0 0 & sleep 1;
rosrun mavros mavcmd long 511 31 5000 0 0 0 0 0 & sleep 1;