{kind=link}
{kind=link}
Open-DSS and SimPy based Cyber-Physical RL environment
The complete research paper is available under the title Reinforcement Learning Environment for Cyber-Resilient Power Distribution System
Use the environment.yaml file to create the conda environment for installing the python packages required in this repository.
Commad: conda env create --file environment.yaml
Description of the files within agents folder
dqn.py: Given the Reward model, training the RL agent using Deep Q Learning.per_dqn.py: Implementation of the Prioritized Experience Replay based-Deep Q Learning
Description of the files within cases folder
123Bus_DER: This folder consists of the Open DSS files for the 123-bus feeder with DER integrated.123Bus_Simple: The folder consists of the Open DSS 123-bus files for the 123-bus feeder base model.123Bus_SimpleMod: Some minor modification from the Simple model.
Description of the files within powergym folder
- It contains the OpenDSS based RL environment for volt var control. Adopted from PowerGym
Description of the files within docs folder
Figures: Contains all the figures used in user documentation.html: Contains all the html file for the user documentation.- All the .rst files are the files generated using the sphinx python package.
Description of the files within envs folder
simpy_env: All the SimPy-based communication RL environments.simpy_dss: All the fused Cyber-Physical RL environments for network reconfiguration and also volt var control.openDSSenv.py: This environment is created for episodic interaction of the OpenDSS simulator for training RL agent, similar to an Open AI Gym environment. Implements the N-1 and N-2 contingencies.openDSSenvSB_DiscreteSpace.py: Have a discrete space model for the OpenDSS environment.generate_scenario.py: This generates unique scenarios for the distribution feeder contingencies.resilience_graphtheory.py: Contains the topological resilience functions.
Description of the files within Figures folder
- Contains all the figure used in the environment and ARM-IRL paper.
Description of the files gurobi folder
- MATLAB implementation of network reconfiguration
- Examples of OPF using gurobi solver in python (with QC relaxation).
Description of the files mininet folder
generate_mininet_ieee123_network.py: Linux router based implementation of the communication network of IEEE-123 bus feeder using static routes.mininet_backend_HC_new_network.py: An open vswitch based router implementation of the communication network of IEEE-123 bus feeder case.generate_network.py: Creates the adjacency matrix of the communication network
Description of the files pyomo_test folder
- folder consist some simple examples for running ACOPF using Pyomo
Description of the files rewards folder
- It containing some trained discriminator network.
Description of the files tests folder
- This includes test of forward RL agents (from stable-baselines and some developed from scratch: refer to
agentsfolder) for the proposed MDP models incorporated in the RL environment.
Description of the files utils folder
- Contains codes for plotting the graphs for the purpose of research papers.
Description of the files validation folder
-
Contains codes for the RL environment validation work.
-
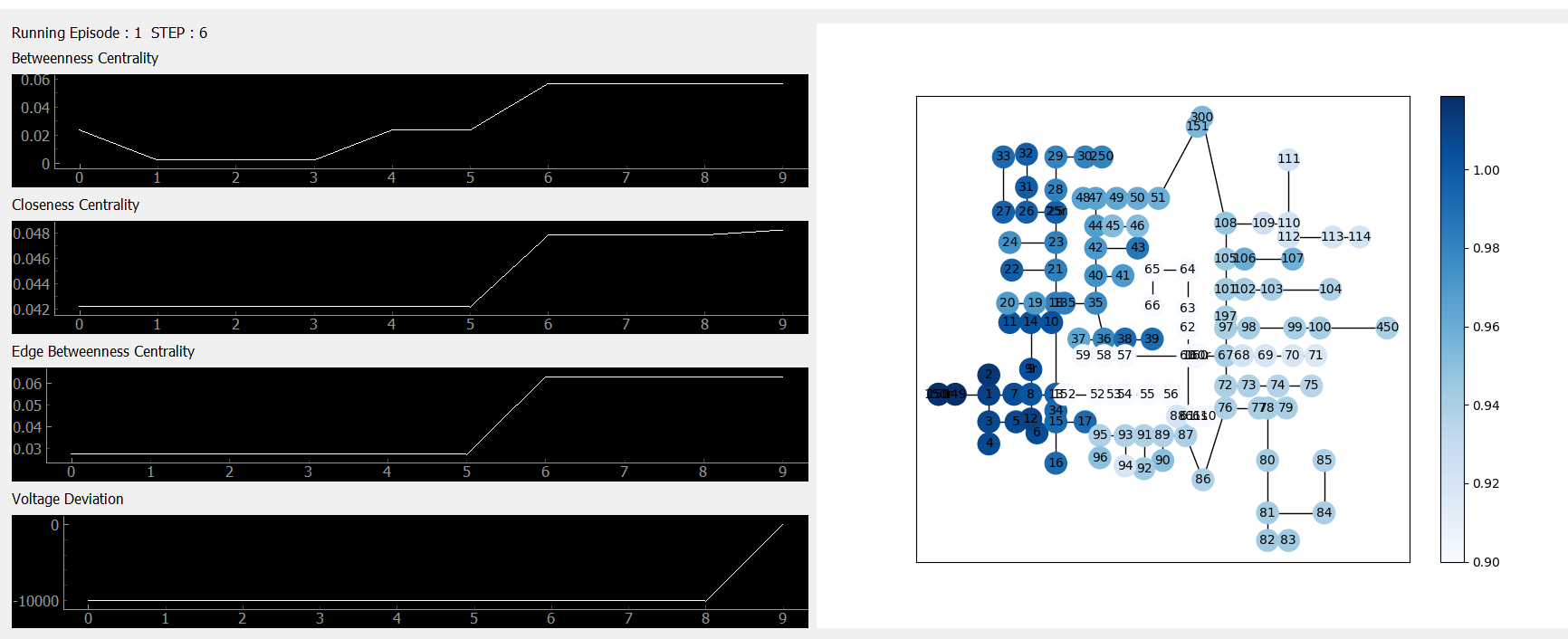
visuals: This folder is a visualization app for visualizing the simulation and observing the resilience metric in real-time as the episodes and their steps are executed. The
OpenDssEnvVisual.pyis the application implementation for the Open DSS physical RL environment.
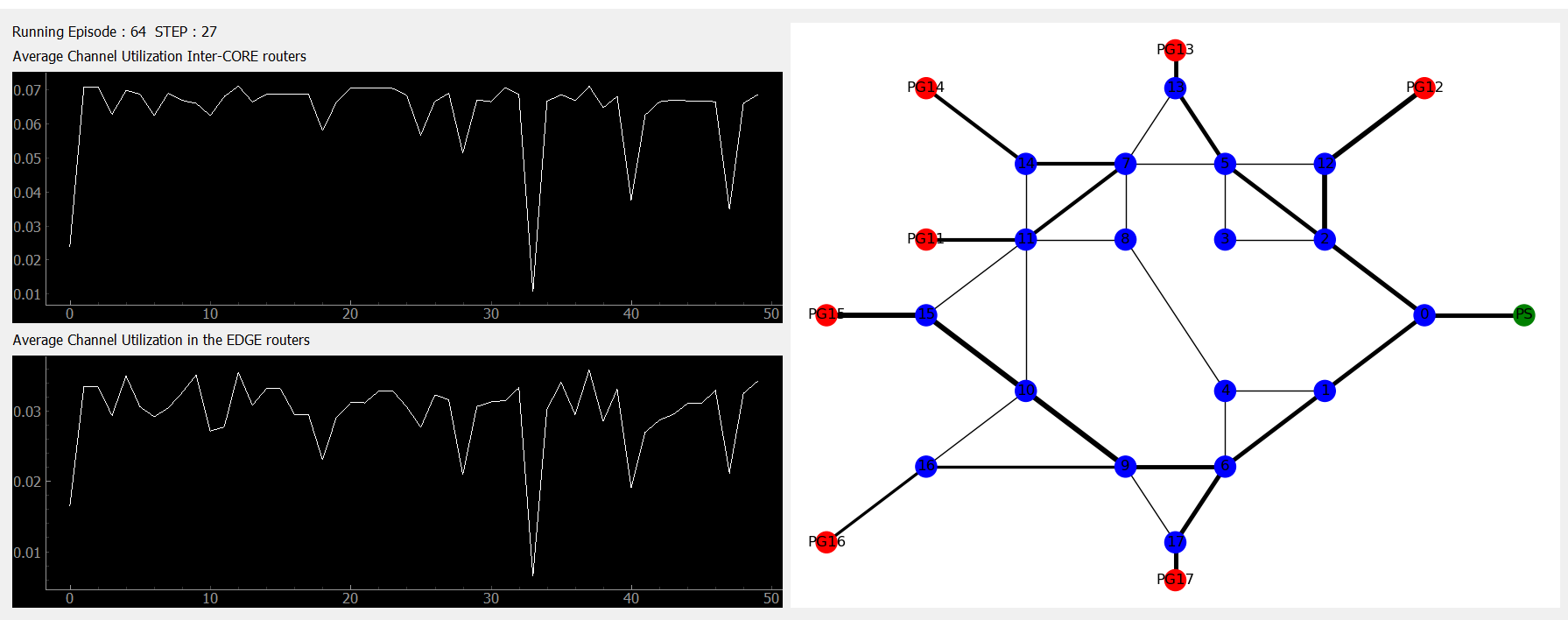
CyberEnvVisual.py is the application implementation for the Simpy based Cyber RL environment. The IEEE 123 bus case is divided into 7 zones. Within each zones there is a data concentrator shown in red node, the green node is the DSO, while all the blue nodes are the Routers represent the hybrid topology.
CyberPhysicalEnvVisual.py is the application implementation for the Simpy based and OpenDSS based CyberPhysical combined RL environment.
User Documentation for the Dss_SimPy_RL alongwith the utilization of this RL environment for Adaptive resilience Metric learning using Inverse Reinforcement Learning (ARM_IRL).