{kind=link}
{kind=link}
Application Qt - Gestion des déplacements du robot principal
Calendrier: en cours
Documentation: en cours
#1. L'application ##1.1) Le cahier des charges
Le but de cette application est de gérer les déplacements du robot principal sur la table de la CdF.
Les actions que doit gérer l'application sont:
- donner les déplacements [avance, reculer, rotation...] à éffectuer
- donner les différents mouvements des bras pour attraper, stocker [cubes, cônes, cylindre, 'coquillages'] et construire les figures demandées.
- donner la liste des capteurs à activer ou à désactiver en foncion de la position du robot
- pourvoir charger le programme généré sur le robot directement depuis l'application (via Wifi)
- basculer d'un côté ou de l'autre facilement [vert ou violet]
- gestion des différentes tables possibles [une solution pour chaque cas]
- gestion des différents niveau de la table (relatif à l'empilement des objets)
Amélioration du confort utilisateur:
- possibilité de zoomer sur une portion de la table
- différentes catégories (etapes/groupe d'étapes/actions/groupe d'actions)
- possibilité d'ajout, suppression, modification de ces catégories
- gestion des collisions
- sauvegarde et ouverture de fichier
à compléter
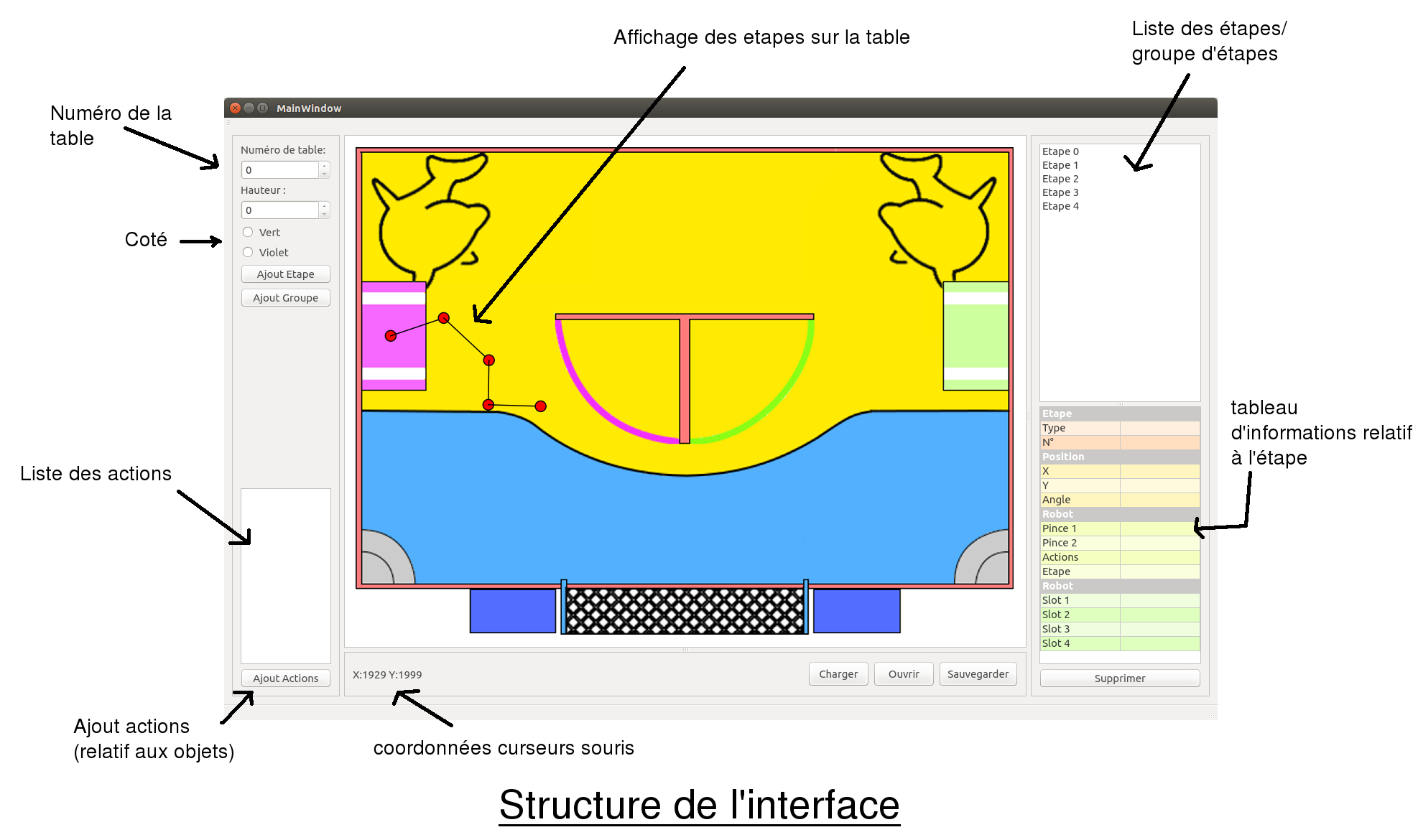
##1.2) Structure de l'interface
##1.3) Structure de la POO
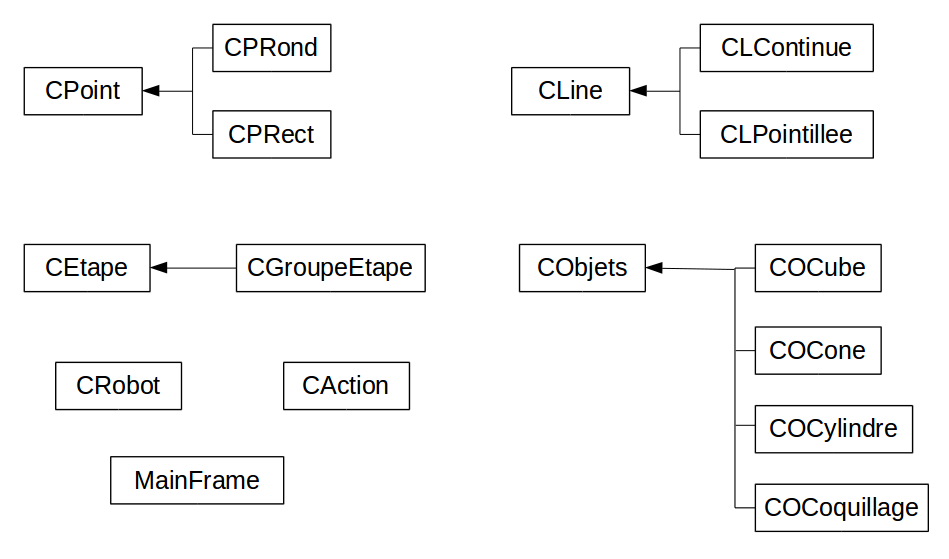
Voici la description succincte de chaque classe. Pour plus d'info aller voir la doc.
| Classes | Descriptions |
|---|---|
| CPoint | Classe de base, gestion de l'affichage de chaque point sur la vue |
| CPRond | Gestion des points ronds |
| CPRect | Gestion des points carrés |
| Classes | Descriptions |
|---|---|
| CLine | Classe de base, gestion de l'affichage de chaque ligne sur la vue |
| CLContinue | Gestion des lignes continue |
| CLPointillee | Gestion des lignes en pointillée |
| Classes | Descriptions |
|---|---|
| CObjet | Classe de base, gestion des objets |
| COCube | Gestion des cubes - affichages / traitements |
| COCone | Gestion des cônes - affichages / traitements |
| COCylindre | Gestion des cylindres - affichages / traitements |
| COCOCoquillage | Gestion des 'coquillages' - affichages / traitements |
| Classes | Descriptions |
|---|---|
| CEtape | Classe de base, gestion de chaque etape (distance à parcourir, rotations...) |
| CGroupeEtape | Regroupement d'étapes pour une meilleure compréhension de l'affichage |
| Classes | Descriptions |
|---|---|
| CAction | Gestion des actions des bras |
| Classes | Descriptions |
|---|---|
| CRobot | Prise en compte de la dimension du robot (-> détection des collisions) |
| Classes | Descriptions |
|---|---|
| MainFrame | Classe principale, gestion de la fenetre |
| Classes | Descriptions |
|---|---|
| QViewTable | Gestion de la vue, hérite de QGraphicsView |
#2. Annexes
Installer GitHub (sous Linux):
apt-get install git
Lors de la première utilisation, cloné les dossiers grâce à cette ligne de commande:
git clone https://github.com/Clav36/Robotech_Gestion_Deplacements.git
Pour modifier les fichiers sur le serveur utiliser les commandes suivantes:
git add <fichier>git commit -m "Commentaires"git push origin master
Pour pouvoir travailler ensemble il nous faut adopter une convention d'écriture:
Commence par un C(Maj) et la première lettre du nom de la classe est aussi en Maj.
Exemple:
class CTest {
/* some code */
}#### Pour les variables:
- Les variables membres statiques:
int m_nNom;
char m_cNom;
double m_dNom;
float m_fNom;
QString m_sNom;
-
Les variables membres dynamiques (pointeurs):
<type>* m_pNom; -
Les variables non membres:
idem que les variables membres mais sans le m_ -
Les variables globales:
idem que les variables membres mais avec g_