之前设计的 ROS 实验“再利用”, 帮助师弟师妹们通过实践快速上手、掌握 ROS 的使用。
各位大佬们不要 star,对各位实际使用没有意义,任务完成后我也会删库。
主要进阶一些的 ROS 操作教程,实现编程控制虚拟仿真环境下的机器人自主导航,以及三维地图构建等 demo。
- 结合实践,尝试利用 ROS 下的各种概念、机制解决一些实际问题;
- 熟悉 ROS 下和 OpenCV、PCL 等库的操作;
- 通过代码了解一下你们的基本技能掌握情况;
- 利用这个仓库演习一下多人协作。
main 分支中是 需要补充的源码,其余两个分支则是留给你们提交补充后源码而创建的,见第三节介绍。
- 先同意我发出的仓库协作邀请(当看到这个文档的时候你们就已经完成了);
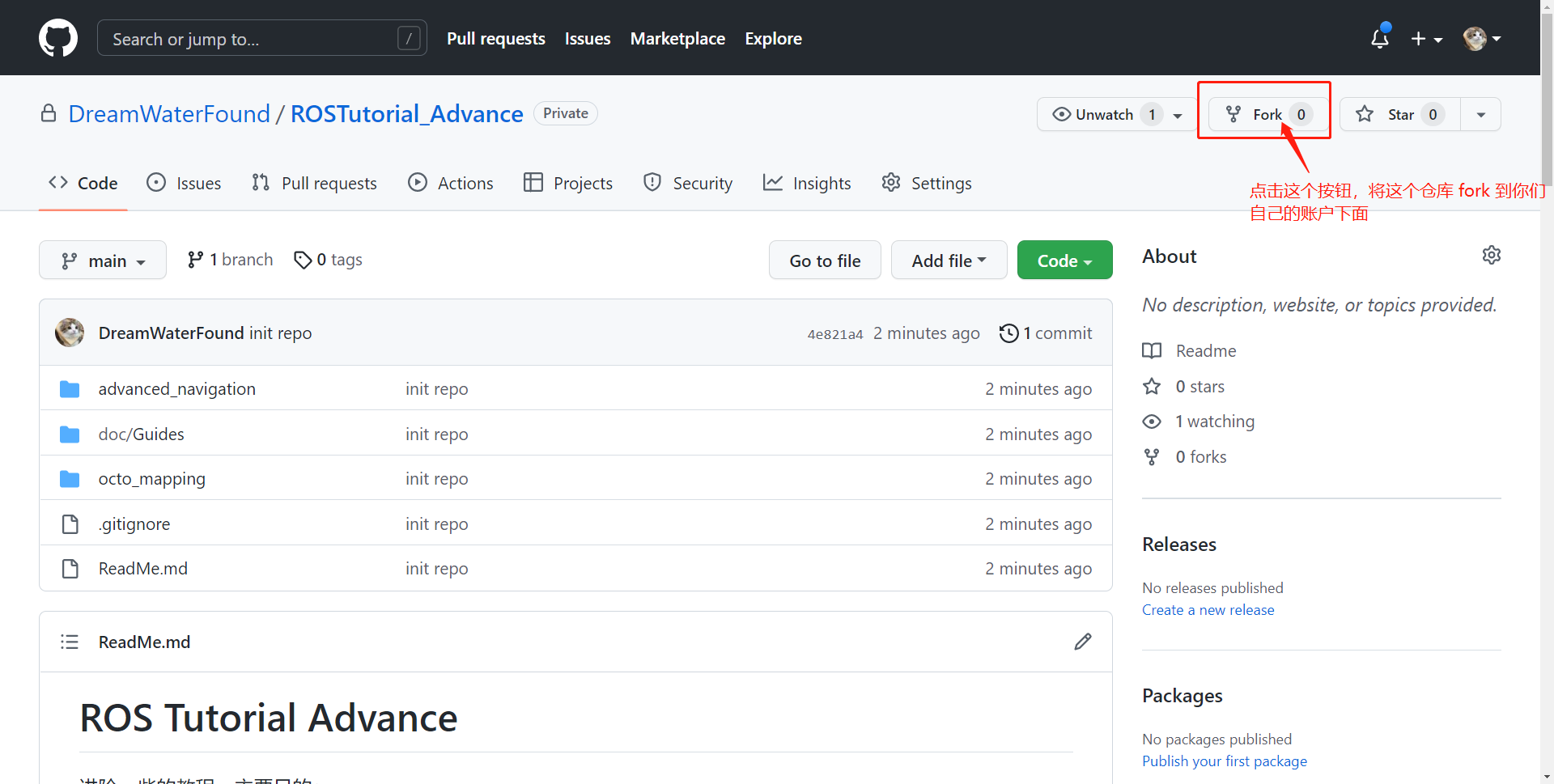
- 点右上角的 Fork 按钮,将这个仓库 Fork 到你们自己的账户下;
- 创建一个专门的 ROS 工作空间,在自己账号下的该代码仓库中,git clone 到自己的电脑上. 例如:
关于链接的获取:
# 创建工作空间,这里放在 ~/ROSTutorial_ws 下,你可以放在任何你想放在的地方 $ cd ~ $ mkdir ROSTutorial_ws $ cd ROSTutorial_ws # 这里的链接在 Github 上可以直接生成,看下图 $ git clone https://github.com/xxx/ROSTutorial_Advance.git # 其实这个仓库就是 ROS 工作空间下 src 文件夹的内容,咱们直接修改为 src $ mv ./ROSTutorial_Advance ./src # 初始化 ROS 工作空间 $ cd src $ catkin_init_workspace # 进行编译, 这个过程不应该有错误发生 $ catkin_make
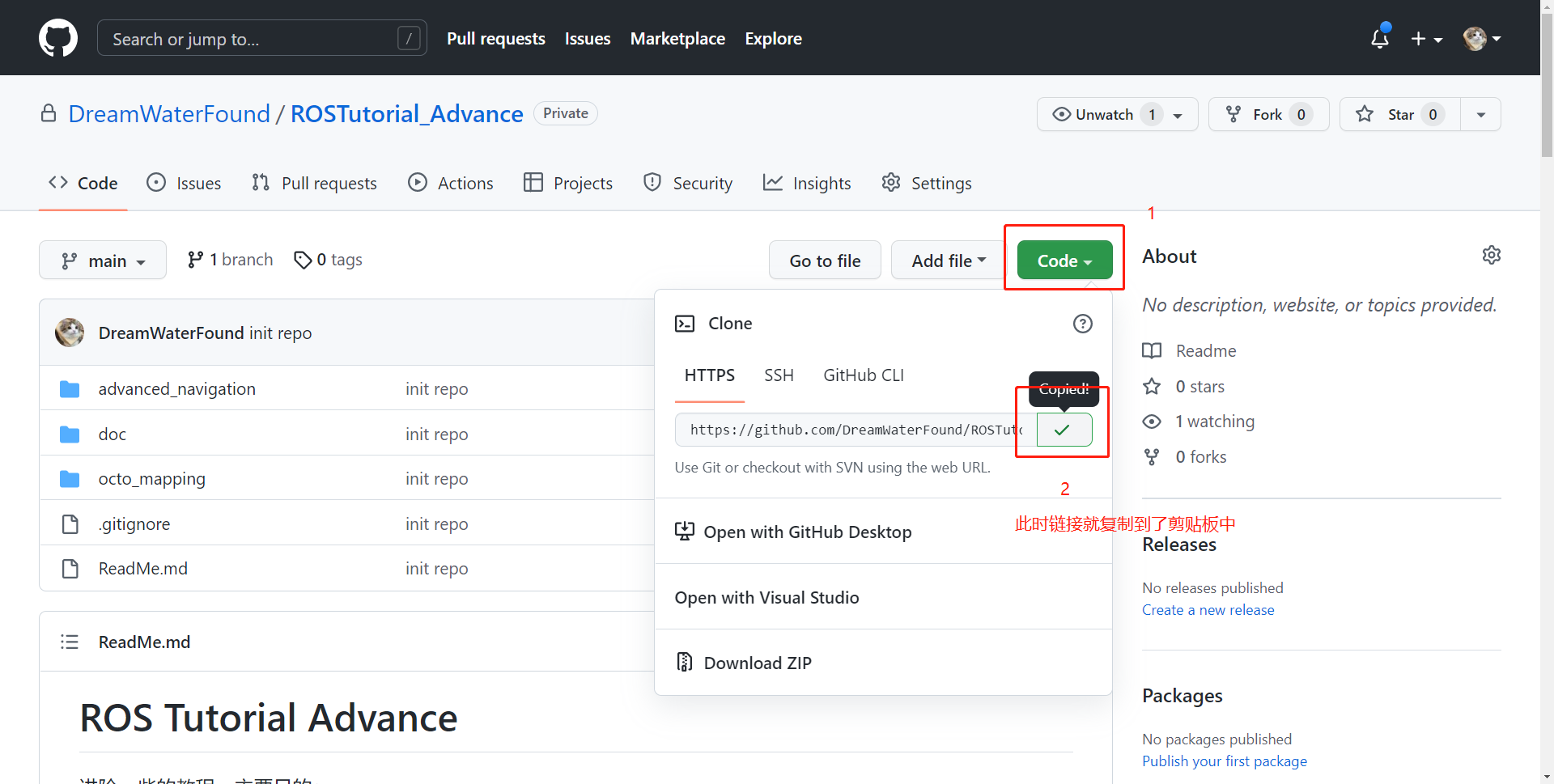
注意使用 git clone 的方式,不要下载 zip 的方式,这种方式只有代码本身,不会包含代码仓库信息
- 在自己的电脑上新建自己命名的分支(branch),务必确保在自己的分支下操作和处理代码;
- 看讲义0、1,跟着做基础的实验。讲义建议下载后查看,在线查看好像有问题;
- 跟着讲义完成教程、补全代码、完成预期功能;
- 每当做出了关键性的进展要及时提交(commit)到本地代码仓库,并且及时同步到自己账号下Github的代码仓库;这是避免因为误删等意外原因,及时止损的关键办法,要养成及时commit的习惯;善用 branch;
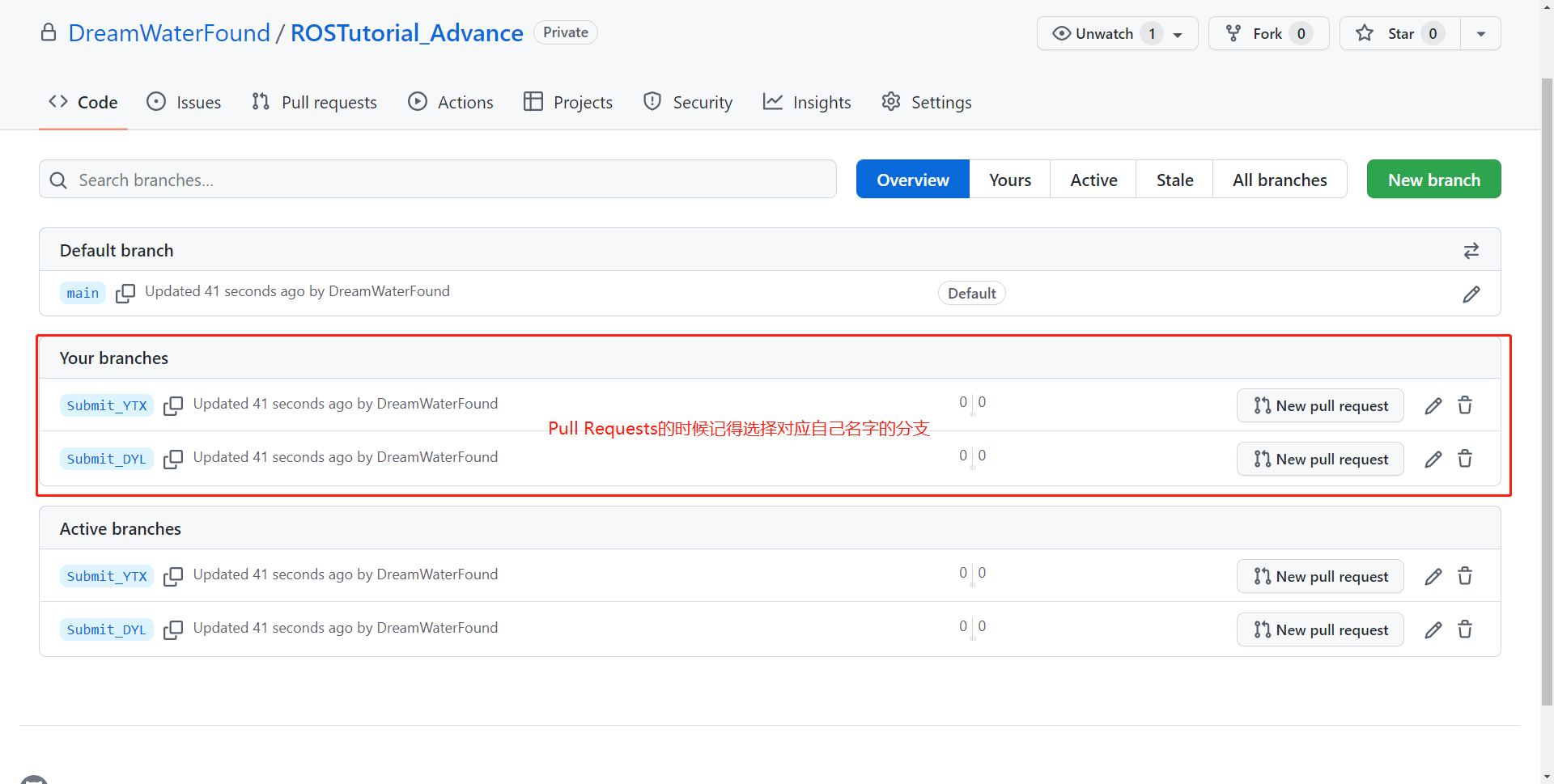
- 每完成一个功能包的代码补全,确保本地代码同步到自己的Github仓库后,提交一个 Pull Requests到师兄账户下的仓库中、和你们自己名字相关的branch下。大致操作:
- 在 Github 仓库页面,点击
Pull Request选项卡: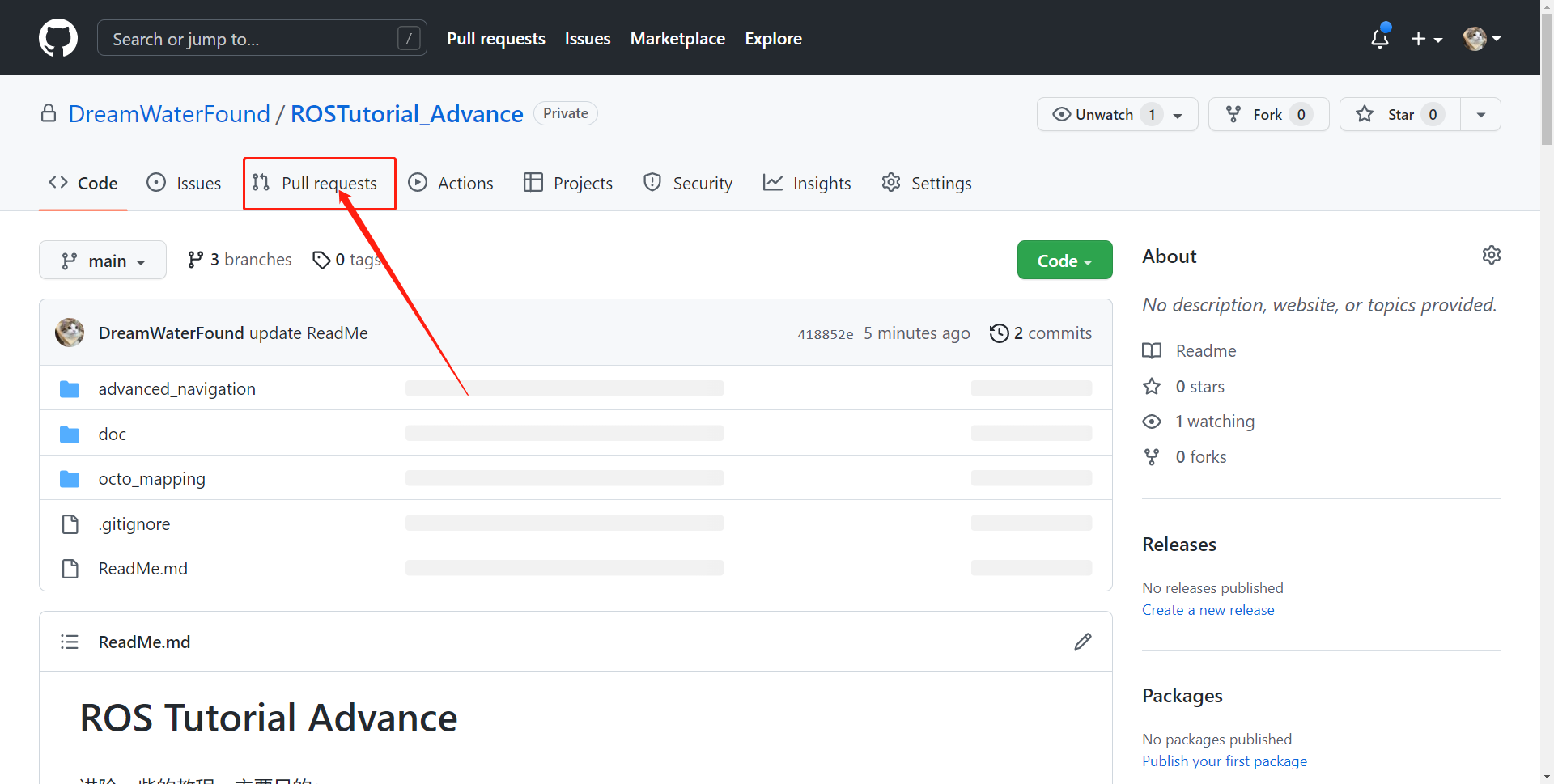
- 在新的界面中,选择提交合并申请的源仓库及分支,并指定目标仓库和分支。由于我自己没法完整演示,这里贴一个之前我将自己代码 pull request 到其他人仓库的例子:
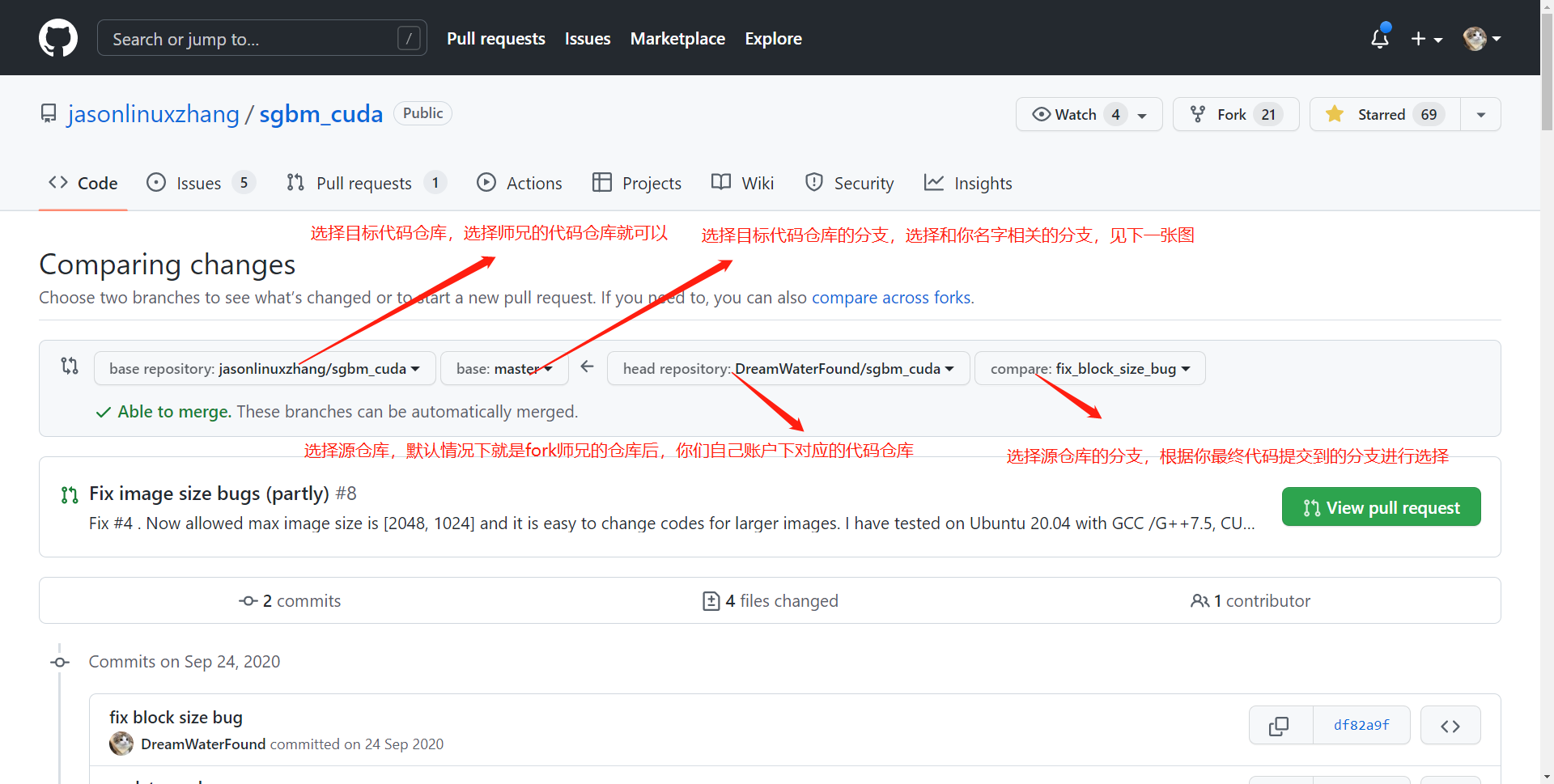
- 一定要选择正确的,和你们名字对应的分支,如:
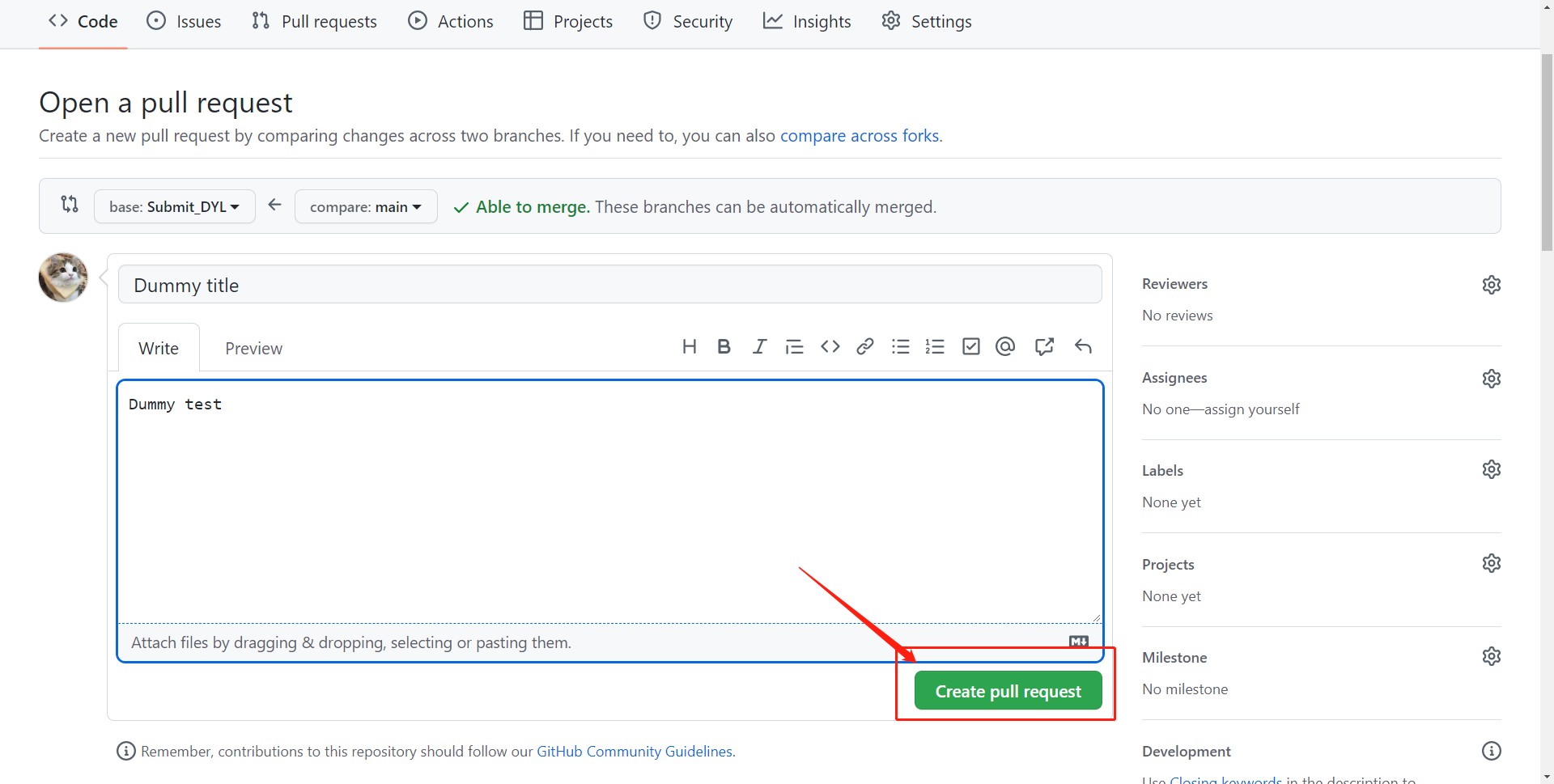
Pull request可能提示没有冲突(即Able to merge),也可能提示有冲突,这个都不要紧。多人代码协作时有冲突是十分正常的,这些冲突未来将由师兄来负责进行Code Review。 - 点击
Create pull request按钮, 下面的图示应该不正确,仅供参考: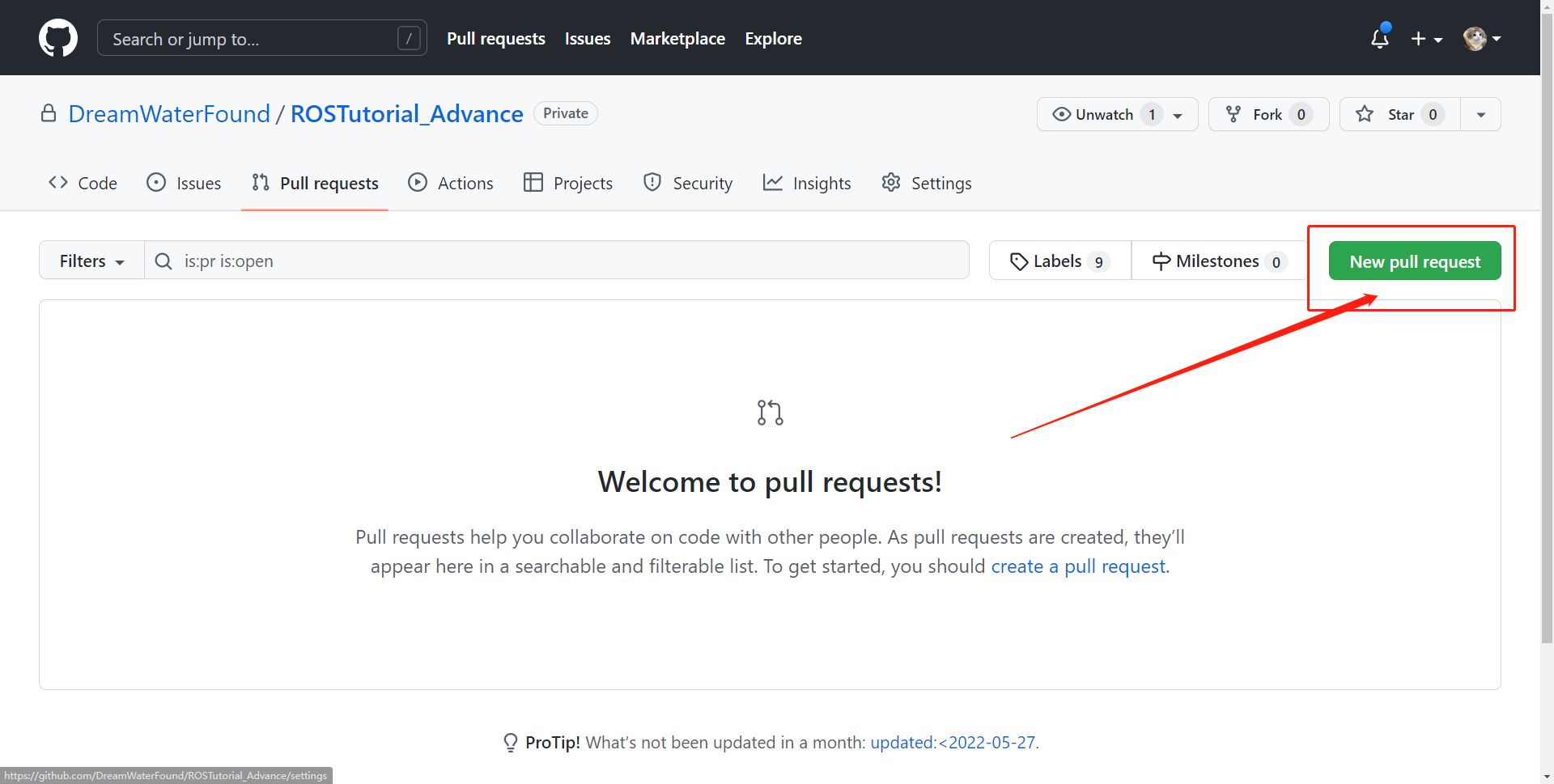
- 此时会让你输入此次 Pull Request 的解释,可以象征性地写一下,和提 issue 差不多。大致是下图的样子,但是应该和你们操作时的界面有出入:
 最后点击
最后点击 Create pull request按钮,整个过程就完成了,师兄这边就会收到相关通知,对你们提交的代码进行处理。
- 在 Github 仓库页面,点击







- 讲义中所有关于 git 的操作不要执行,会搞乱你们自己的代码仓库
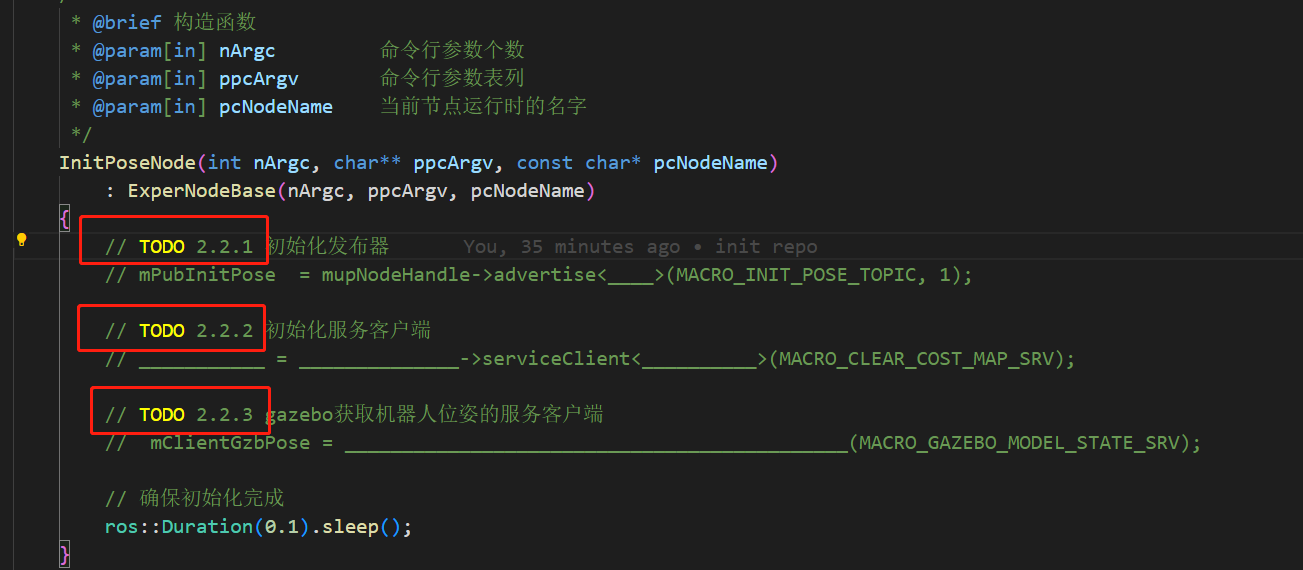
- 这样子的注释表示,此处需要补充的代码对应哪个章节的实验:
- 讲义中 3.5 节提到的实验不需要完成
- 讲义编写之初是面向已经系统性学习过ROS的本科生,为了实验课成绩有区分度而设计,越靠后的实验难度越大,所以在现阶段你们在做实验的过程中,有困难或者吃力的感觉是正常的,讲义和代码也有一些没说清楚或者存在错误的地方。有什么不懂或者疑惑的欢迎随时问我

代码变量命名继承了匈牙利命名法的大部分特点. 这种命名方法看上去十分冗长, 但是不仅可以做到"见名知义",还可"见名知类型".
同学们自己写程序的时候还是以实现功能为第一要务, 不必遵循程序中的命名规则.
对于非数学对象, 变量名主要由: 作用域 + 类型 + 描述 组成. 如 ExperNodeBase.hpp 中的 ExperNodeBase::mupNodeHandle:
- m: member, 作用域, 表示这个变量是类的成员变量
- up: unique_ptr, 类型, 表示这个变量是 std::unique_ptr 型变量
- NodeHandle: 描述, 遵循驼峰命名法, 表示这个变量和节点句柄相关
作用域一般有这几类:
- m: member, 类的成员变量
- l: local, 程序中定义的局部变量, 但是一般这个前缀不加
- g: global, 全局变量
常用的类型有这几类: 基本类型:
- n: number, int, unsigned int, long, uint64_t, size_t 等等表示整数的变量
- c: 特指 char, unsigned char
- f: float型浮点数
- d: double 型浮点数
- e: enum, 枚举变量
- p: 指针, 通常与上述搭配, 如 pdMax 表示指向最大值的指针变量, 指向的变量是 double 类型 标准库类型:
- str: string, 字符串, 通常指代 std::string
- v: vector, 通常指代 std::vector
- map: map, 键值对映射表, 通常指代 std::map 一族
- list:list, 列表, 通常指代 std::list
- a: array, 通常指代 boost::array 和 std::array,; 传统 C 风格数组使用 p 表示
- sp: shared_ptr, 共享指针, 通常指代 boost::shared_ptr 和 std::shared_ptr
- up: unique_ptr, 不知道咋说, 通常指代 boost::unique_ptr 和 std::unique_ptr
方便起见,对于指针和带有模板参数的基本类型和标准库类型可以"套娃":
std::vector<size_t> vnVar1;
std::unique_ptr<std::vector<float> > upvfVar2;
std::vector<std::vector<int*> > vvpnVar3;
std::vector<std::vector<std::vector<float> > >
vvvfVar3;注意 这一节主要时解释为啥给你们的代码中,变量名字显得那么奇葩。这次教程不限制你们自己对变量、函数、类型等命名的方法,最后能够完成实验就行,变量命名方面你们用自己习惯的方法即可(当然意义不明显的f1 f2 f3 v1 a aa a2 这类的不推荐嗷 )。
刘国庆
2022.06.28