SECOND detector. Based on my unofficial implementation of VoxelNet with some improvements.
ONLY support python 3.6+, pytorch 0.4.1+. Don't support pytorch 0.4.0. Tested in Ubuntu 16.04/18.04.
Feel free to contact me by issue or email if encounter any problems. I don't know whether this project is runnable in other computer.
Car [email protected], 0.70, 0.70:
bbox AP:90.80, 88.97, 87.52
bev AP:89.96, 86.69, 86.11
3d AP:87.43, 76.48, 74.66
aos AP:90.68, 88.39, 86.57
Car [email protected], 0.50, 0.50:
bbox AP:90.80, 88.97, 87.52
bev AP:90.85, 90.02, 89.36
3d AP:90.85, 89.86, 89.05
aos AP:90.68, 88.39, 86.57
git clone https://github.com/traveller59/second.pytorch.git
cd ./second.pytorch/secondIt is recommend to use Anaconda package manager.
pip install shapely fire pybind11 pyqtgraph tensorboardXIf you don't have Anaconda:
pip install numbaFollow instructions in https://github.com/facebookresearch/SparseConvNet to install SparseConvNet.
Install Boost geometry:
sudo apt-get install libboost-all-devyou need to add following environment variable for numba.cuda, you can add them to ~/.bashrc:
export NUMBAPRO_CUDA_DRIVER=/usr/lib/x86_64-linux-gnu/libcuda.so
export NUMBAPRO_NVVM=/usr/local/cuda/nvvm/lib64/libnvvm.so
export NUMBAPRO_LIBDEVICE=/usr/local/cuda/nvvm/libdevice- Dataset preparation
Download KITTI dataset and create some directories first:
└── KITTI_DATASET_ROOT
├── training <-- 7481 train data
| ├── image_2 <-- for visualization
| ├── calib
| ├── label_2
| ├── velodyne
| └── velodyne_reduced <-- empty directory
└── testing <-- 7580 test data
├── image_2 <-- for visualization
├── calib
├── velodyne
└── velodyne_reduced <-- empty directory
- Create kitti infos:
python create_data.py create_kitti_info_file --data_path=KITTI_DATASET_ROOT- Create reduced point cloud:
python create_data.py create_reduced_point_cloud --data_path=KITTI_DATASET_ROOT- Create groundtruth-database infos:
python create_data.py create_groundtruth_database --data_path=KITTI_DATASET_ROOT- Modify config file
There is some path need to be configured in config file:
train_input_reader: {
...
database_sampler {
database_info_path: "/path/to/kitti_dbinfos_train.pkl"
...
}
kitti_info_path: "/path/to/kitti_infos_train.pkl"
kitti_root_path: "KITTI_DATASET_ROOT"
}
...
eval_input_reader: {
...
kitti_info_path: "/path/to/kitti_infos_val.pkl"
kitti_root_path: "KITTI_DATASET_ROOT"
}python ./pytorch/train.py train --config_path=./configs/car.config --model_dir=/path/to/model_dir-
Make sure "/path/to/model_dir" doesn't exist if you want to train new model. A new directory will be created if the model_dir doesn't exist, otherwise will read checkpoints in it.
-
training process use batchsize=3 as default for 1080Ti, you need to reduce batchsize if your GPU has less memory.
-
Currently only support single GPU training, but train a model only needs 20 hours (165 epoch) in a single 1080Ti and only needs 40 epoch to reach 74 AP in car moderate 3D in Kitti validation dateset.
python ./pytorch/train.py evaluate --config_path=./configs/car.config --model_dir=/path/to/model_dir- detection result will saved as a result.pkl file in model_dir/eval_results/step_xxx or save as official KITTI label format if you use --pickle_result=False.
Before using pretrained model, you need to modify some file in SparseConvNet because the pretrained model doesn't support SparseConvNet master:
- convolution.py
# self.weight = Parameter(torch.Tensor(
# self.filter_volume, nIn, nOut).normal_(
# 0,
# std))
self.weight = Parameter(torch.Tensor(
self.filter_volume * nIn, nOut).normal_(
0,
std))
# ...
# output.features = ConvolutionFunction.apply(
# input.features,
# self.weight,
output.features = ConvolutionFunction.apply(
input.features,
self.weight.view(self.filter_volume, self.nIn, self.nOut),- submanifoldConvolution.py
# self.weight = Parameter(torch.Tensor(
# self.filter_volume, nIn, nOut).normal_(
# 0,
# std))
self.weight = Parameter(torch.Tensor(
self.filter_volume * nIn, nOut).normal_(
0,
std))
# ...
# output.features = SubmanifoldConvolutionFunction.apply(
# input.features,
# self.weight,
output.features = SubmanifoldConvolutionFunction.apply(
input.features,
self.weight.view(self.filter_volume, self.nIn, self.nOut),You can download pretrained models in google drive. The car model is related to car.config and the people model is related to people.config.
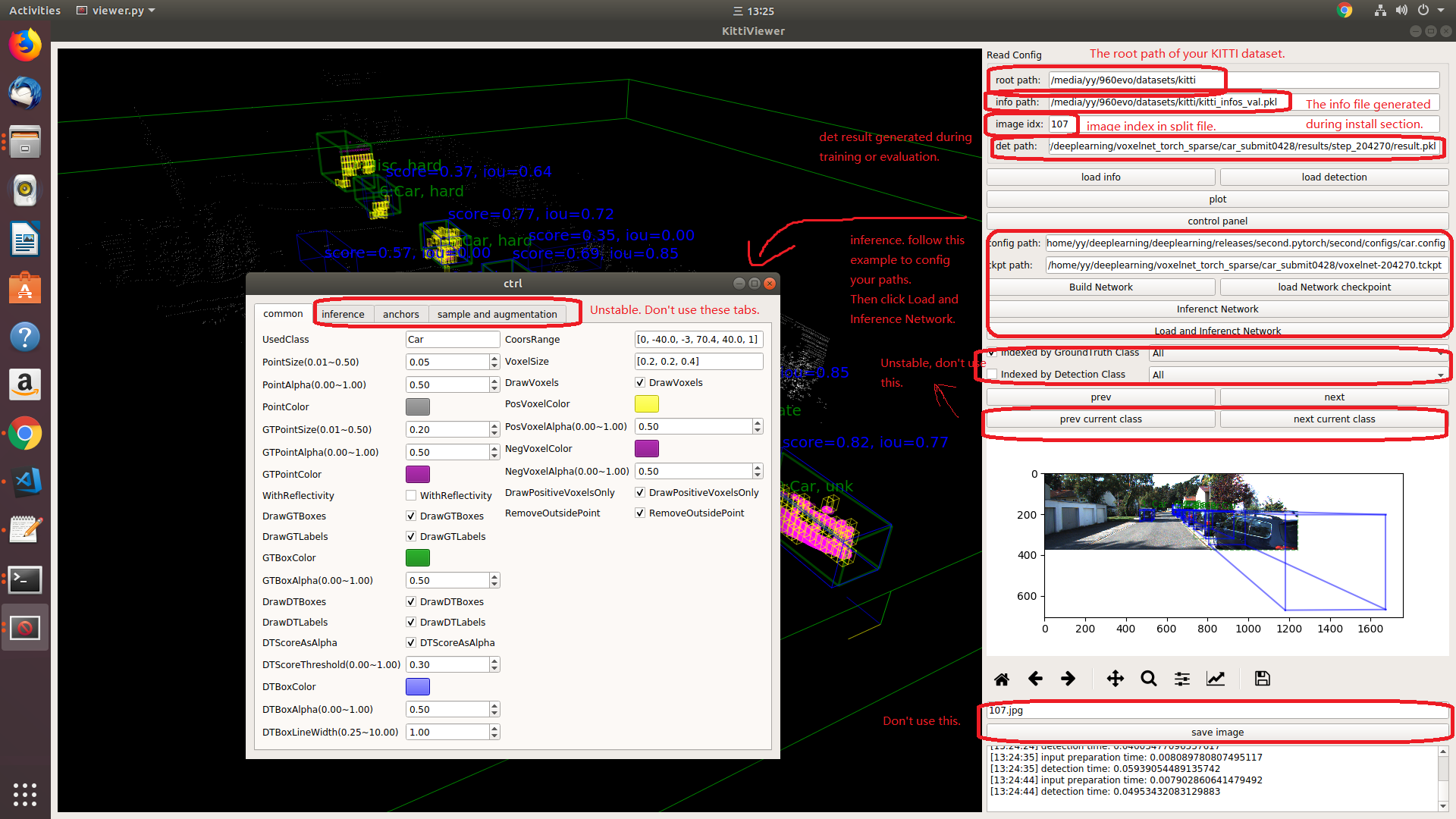
You should use kitti viewer based on pyqt and pyqtgraph to check data before training.
run python ./kittiviewer/viewer.py, check following picture to use kitti viewer:
- Kitti lidar box
A kitti lidar box is consist of 7 elements: [x, y, z, w, l, h, rz], see figure.
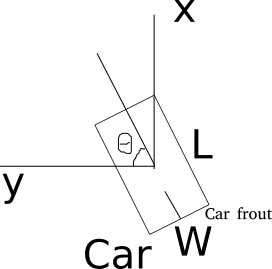
All training and inference code use kitti box format. So we need to convert other format to KITTI format before training.
- Kitti camera box
A kitti camera box is consist of 7 elements: [x, y, z, l, h, w, ry].