This repo contains my notes from Andrej Karpathy's lectures.
---
title: Learning map
---
flowchart TB
id1[function backpropagation + activation] --> id2[neuron backprop] --> id3["NN backprop + loss function (update gradient every step)"]
see notebook here
- loss function: negative log likelihood
- not a good model, the names produced does not resemble "names"
see notebook here
- We see similar results compared to first because NN is very simple
- lit: A Neural Probabilistic Language Model
- 17000 vocab associated with a point in vector space (30 features eg)
- components:
- lookup table: C 17000 x 30
- index of incoming word
- input layer: 90 neurons total (30 neurons for 3 words)
- hidden layer: arbitrary number of neurons (100 neurons)
- hyperparameter (this term means can be as large as you want)
- fully connected with input layer
- tanh activation function
- output layer (expensive layer: also fully connected with hidden layer)
- softmax (exponentiated, normalized)
- pluck out probability of word and compare to actual word
- backpropagation optimization
see here
we would expect uniform distribution of next-letter probability, i.e. log of 1/27
- the shape of the loss looks like a hockey stick
- the initial iterations are squashing down the logits
W2 = torch.randn((n_hidden, vocab_size), generator=g) * 0.01
b2 = torch.randn(vocab_size, generator=g) * 0- Note W2 cannot be all 0!
- the multiplier = the value of the sd of W2
-
it is a squashing function
-
if the value is 1 or -1 in backpropagation, the gradient is 0 so backpropagation stops: "dead neuron"
- neuron output is all 1 or -1
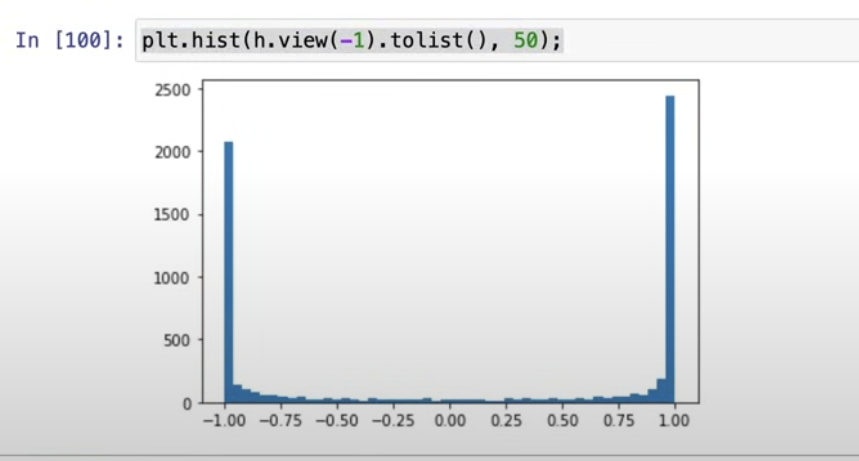
- neuron output is all 1 or -1
-
i.e. one column completely white
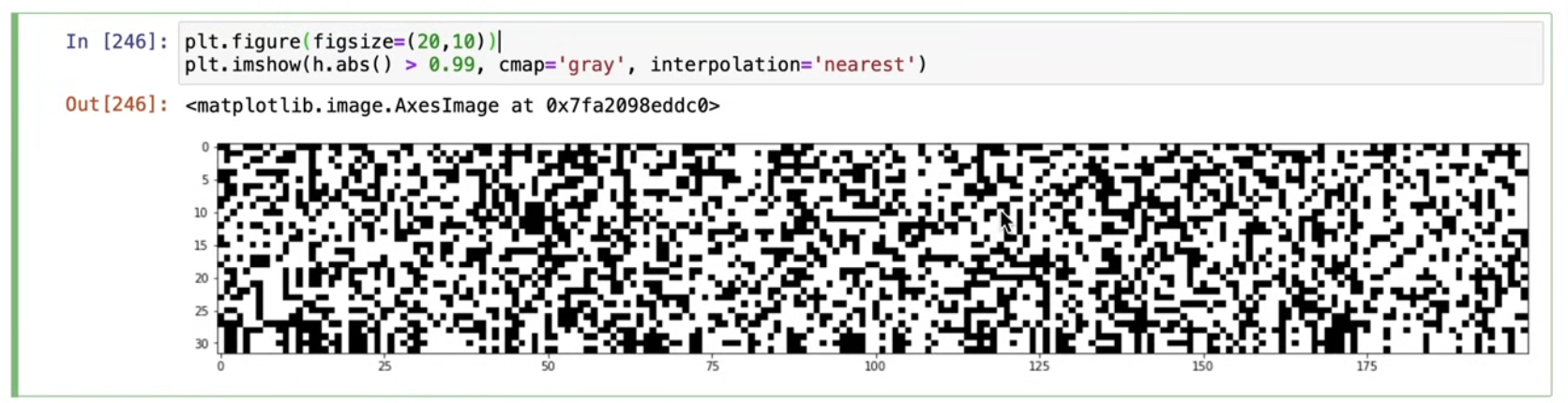
-
same issue with sigmoid and relu
- alternative: leaky relu or elu



- can happen at initialization or optimization (with high learning rate)
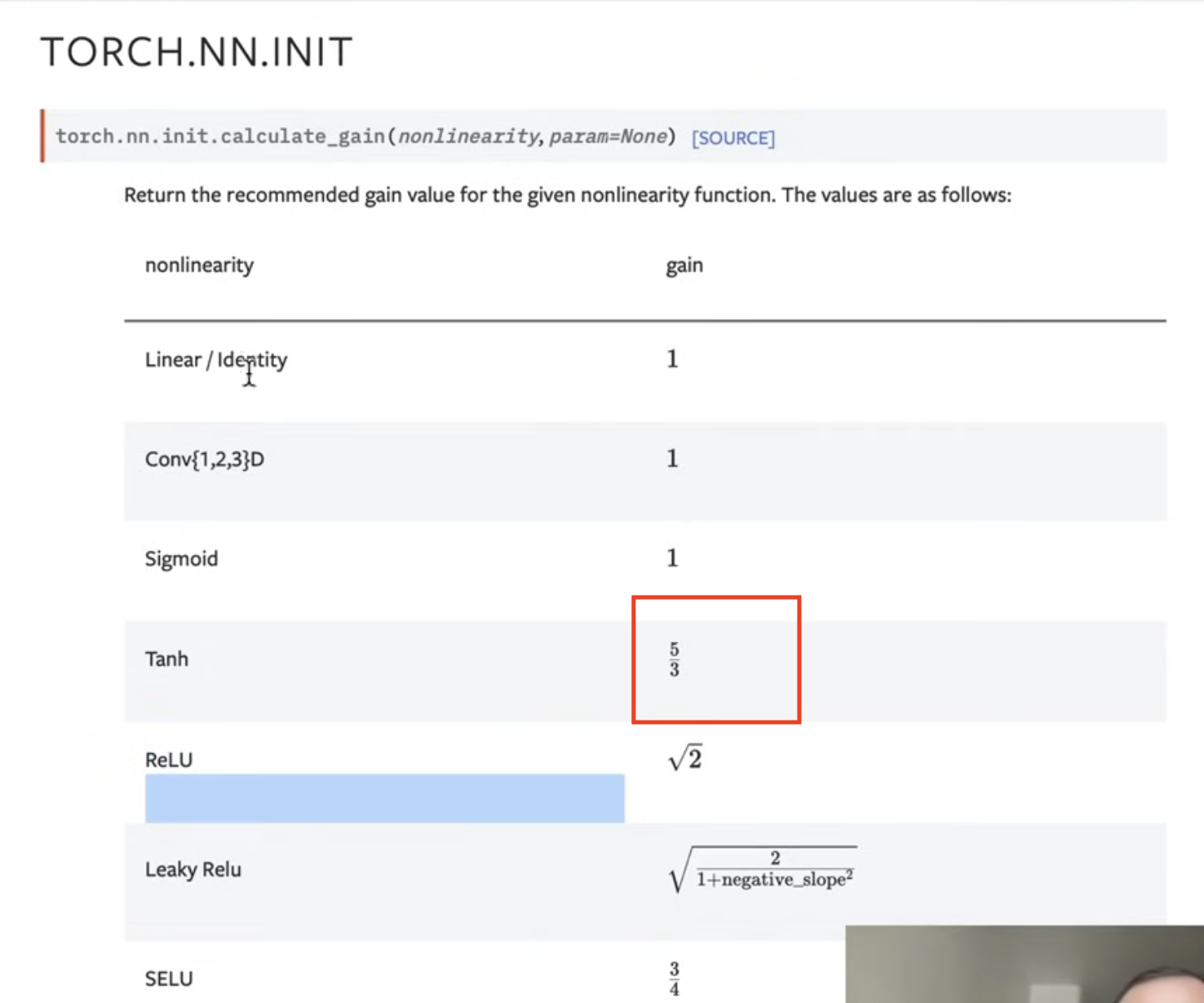
solution
W1 = torch.randn((n_embd * block_size, n_hidden), generator=g) * (5/3)/((n_embd * block_size)**0.5)- deeper the network the more significant the problem
- the multiplication above is trying to preserve the guassian distribution of the input (i.e. keeping a small standard deviation)
- the factor is square root of (5/3)/ (n_embd * block_size)
- Kaiming initialization
- the factor is square root of (5/3)/ (n_embd * block_size)


- based on paper
- normalize the hidden layer
hpreact = embcat @ W1 #+ b1 # hidden layer pre-activation- Calculate the mean and standard deviation of the hidden layer
bnmeani = hpreact.mean(0, keepdim=True)
bnstdi = hpreact.std(0, keepdim=True)- mean: taking mean of everything in the batch (average of any neuron activation)
- std: standard deviation of the batch
- remember we only want this at initialization, not during training
- Scale and shift! (offset with gain and bias)
- note
bngainandbnbiasbelow
hpreact = bngain * (hpreact - bnmeani) / bnstdi + bnbias
with torch.no_grad():
bnmean_running = 0.999 * bnmean_running + 0.001 * bnmeani
bnstd_running = 0.999 * bnstd_running + 0.001 * bnstdi