- 移植linux系统到ZCU102
- 装有Linux系统的上位机(或虚拟机)一台,本实验使用Linux版本为Ubuntu 16.04.6 LTS
- Xilinx Zynq系列ZCU102开发板一块
- 上位机安装vivado,本实验所用版本为2018.3
- 移植的Linux版本见下文“源码下载”
- 本实验最终的linux系统以开发板SD卡启动作为启动方式,需要配置SD卡并建立分区。见UG1144第七章
- 使用gparted将SD卡格式化,并新建分区
- 安装gparted工具:
sudo apt-get install gparted - 运行:
sudo gparted
- 安装gparted工具:
- 之后在gparted对SD卡进行分区。分2个主分区,第一个分区取名(设置卷标)为BOOT,文件系统选择FAT32,容量为1GB(大于60MB);第二个分区取名为RootFS,占有剩余的全部容量,文件系统选择EXT4。
-
从github上下载由xilinx提供的linux内核、u-boot源码以及其他相关的工程插件,下载时一定要注意统一源码以及工程的版本。相应的下载地址如下:
编号 网址 1 内核源码 2 u-boot源码 3 DTG插件 4 DTC 5 ATF 6 Xilinx Xen branch 7 Xilinx embeddedsw repository 
-
特别的,vivado工程生成的设备树源码文件有问题,可以用patelinux建立,此处直接给出,即files中zcu102-rev1.0.dts
-
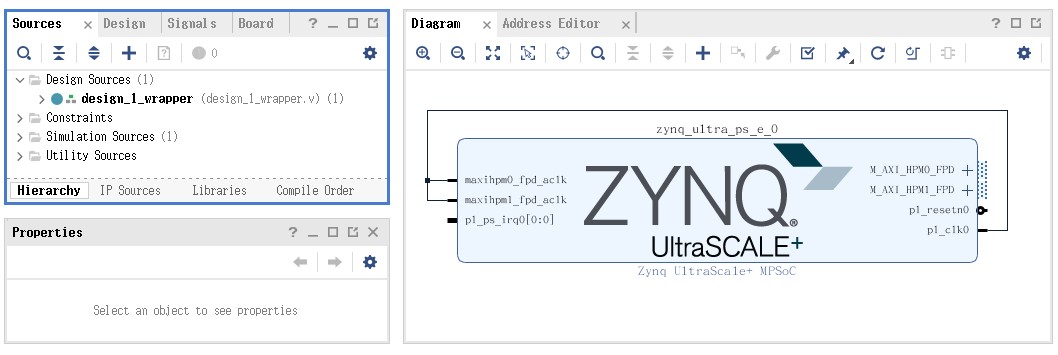
打开vivado,新建工程,板卡选择zcu102,打开Blockdesign,对MPSOC进行automatic,连线clock如下图
-
保存、编译,然后使用vivado的generate output products功能,生成相关 IP 的网表、设计、仿真文件。选择 create HDL Wrapper,自动生成 HDL顶层代码(vivado的主要优势,无需关心HDL级设计,通过高层综合生成HDL级IP核)
-
生成bitstream文件design_1_wrapper.bit,选择 Export Hardware导出硬件配置文件,硬件设计部分到此完成,然后Launch SDK
-
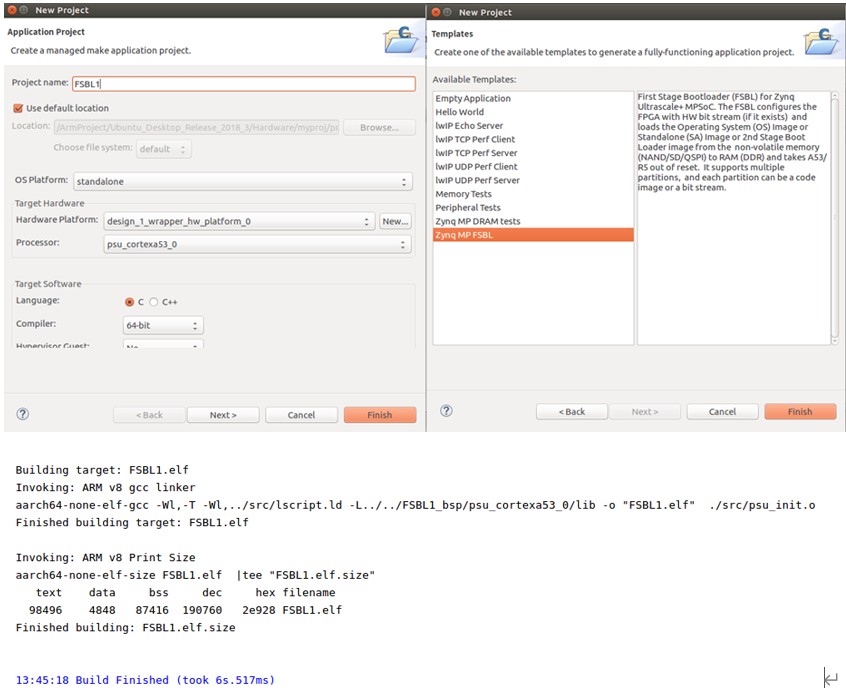
FSBL的全称为first stage boot loader,是zynq启动第一阶段的加载程序,经过了FSBL这一阶段,后面系统才能够运行裸机程序或者是引导操作系统的u-boot。可以使用SDK软件来创建FSBL:
- 硬件设计已经整合在了design_1_wrapper_hw_platform_0中
- 打开SDK软件,New->Application Project->Next->finish
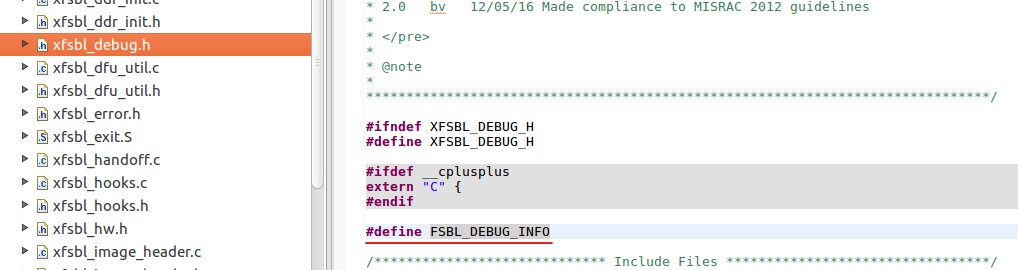
- 在FSBL->src->xfsbl_debug.h中添加 #define FSBL_DEBUG_INFO ->保存。这样做的目的是为了在上电后输出FSBL的调试信息,以便出现问题时定位问题所在
- 保存后,自动编译,在工程文件夹.sdk目录下FSBL目录(名称为自定义,可能不相同)下Debug内生成FSBL.elf文件
-
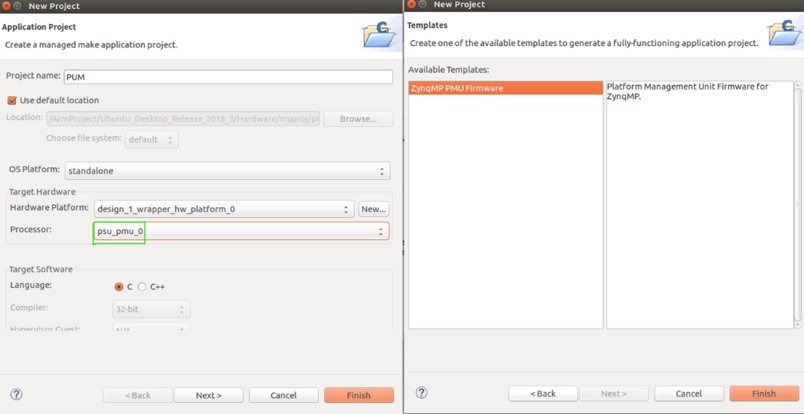
PMU: platform management unit, 平台管理单元负责在加载FSBL之前进行调试,系统和软件的复位。PMU固件可以通过SDK软件创建
-
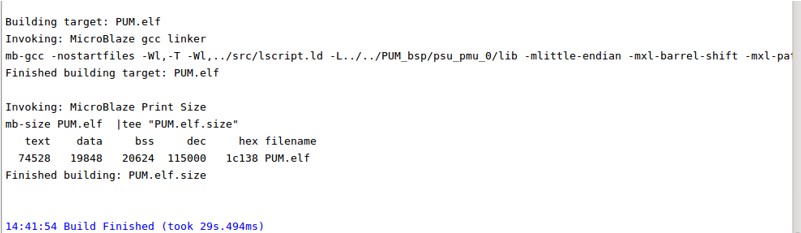
New->Application Project->Processor选择psu_pmu_0,点击Next,选择Zynq PMU Firmware->finish,最后在工程目录下.sdk目录下/PMU/Debug/下生成可执行文件PMU.elf

-
ATF的主要功能是在安全环境与非安全环境切换。创建ATF是创建BOOT.bin文件必不可少的一环
-
从链接中下载arm-trusted-firmware-xilinx-v2018.3.zip,解压后进入文件夹(本实验为arm-trusted-firmware-master)。
-
执行make命令
make CROSS_COMPILE=aarch64-none-elf- PLAT=zynqmp RESET_TO_BL31=1

-
编译完成后可以在
/arm-trusted-firmware-master/build/zynqmp/release/bl31/发现可执行文件bl31.elf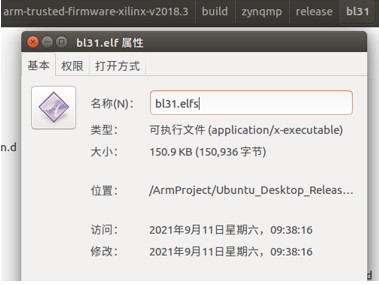
-
从链接下载相应版本的u-boot源码,并解压到合适路径下,下文以./u-boot-xlnx-xilinx-v2018.3代指
- 添加正确的路径变量,此处作为临时环境变量添加,对于ZCU102:
export CROSS_COMPILE=aarch64-linux-gnu- export ARCH=aarch64
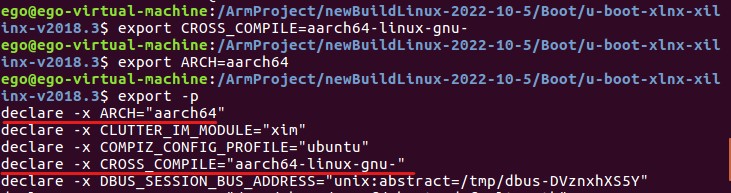
- 编译u-boot源码(编译方法与源码版本有关,这里使用的是2018.3版本):
make distclean make xilinx_zynqmp_zcu102_rev1_0_defconfig make
编译完成后可以在./u-boot-xlnx-xilinx-v2018.3/下发现可执行文件u-boot.elf

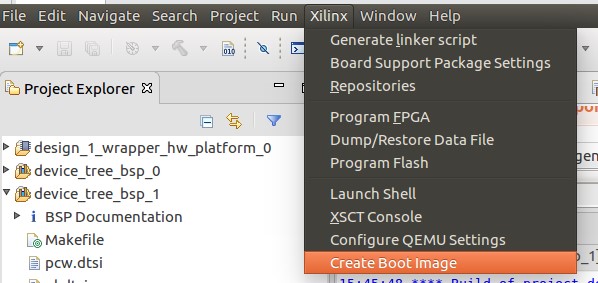
- 可以使用SDK软件来制作BOOT.bin文件
-
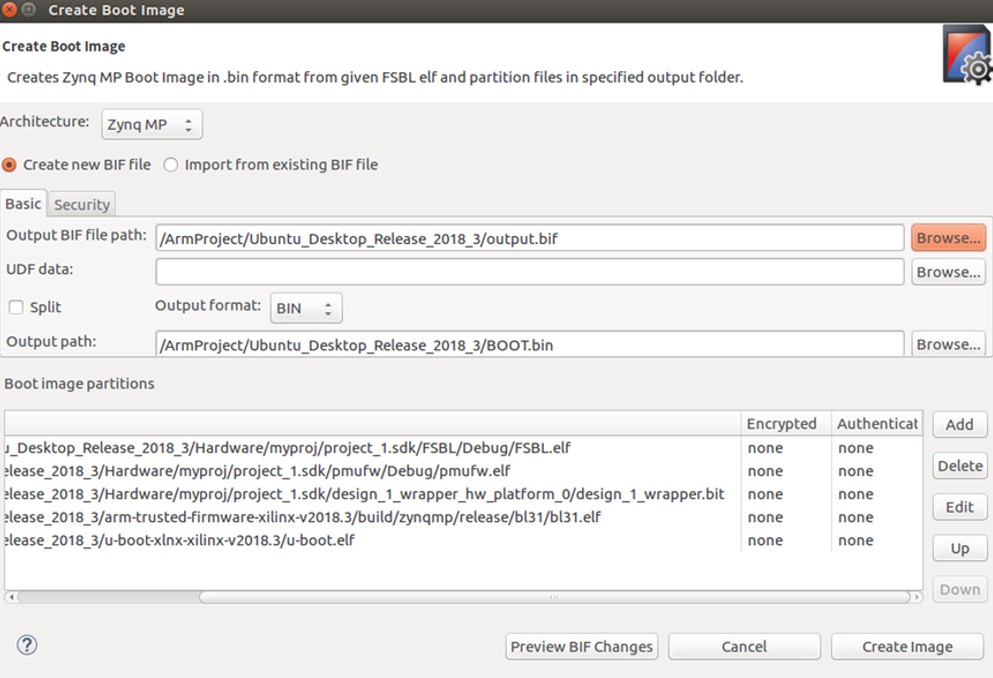
SDK->Xilinx->Create Boot Image
-
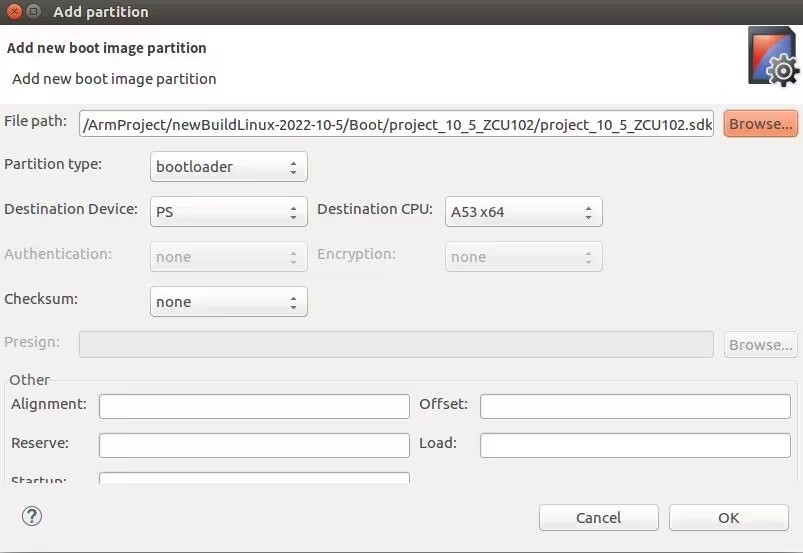
选择create new BIF file
-
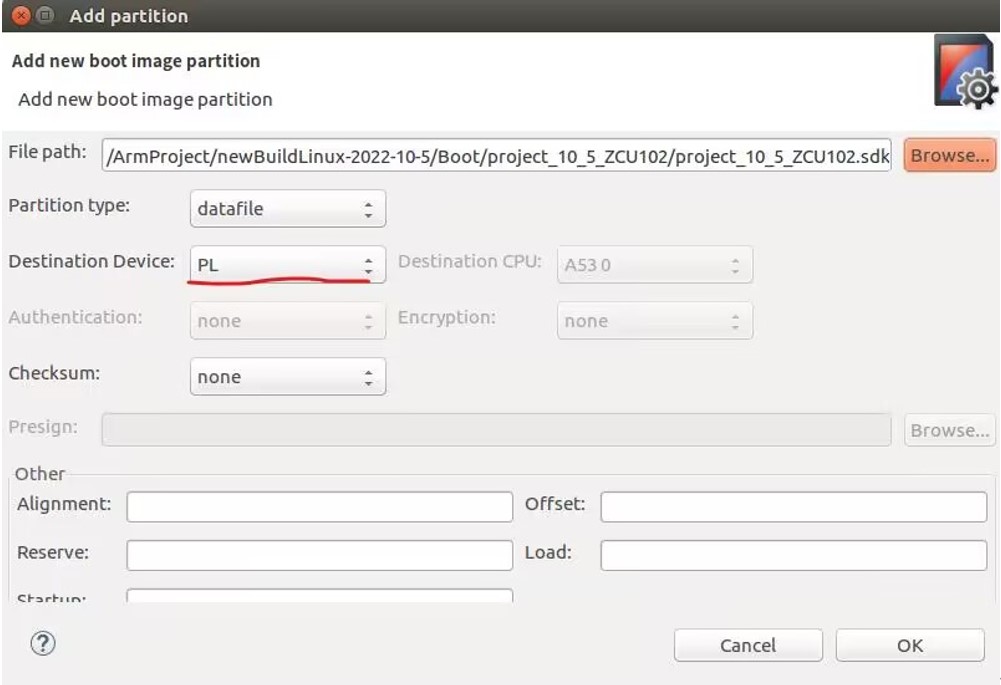
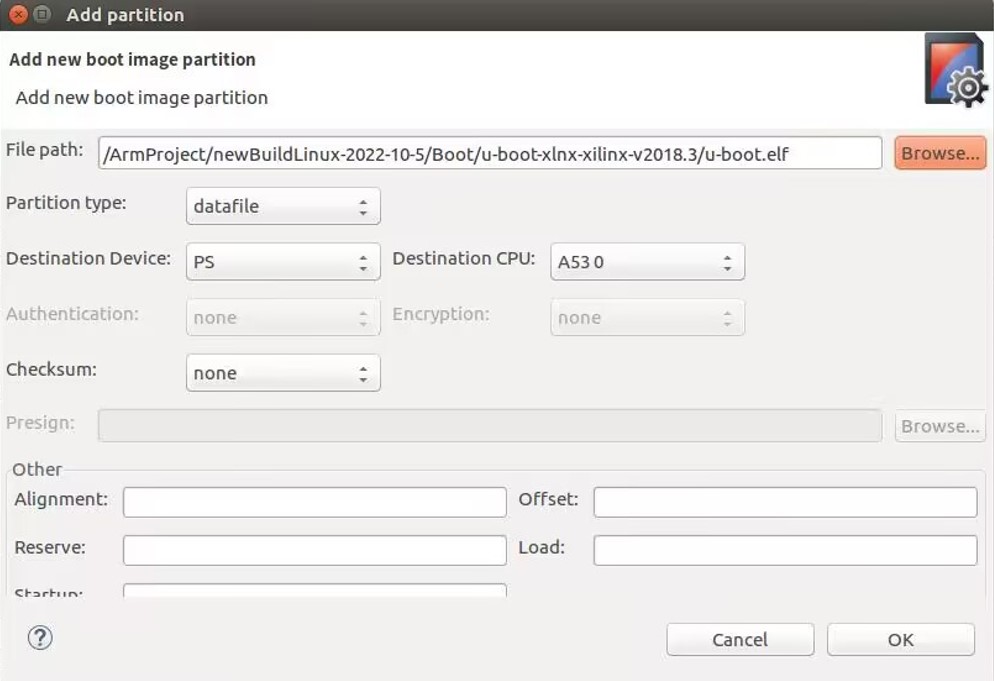
Boot image的五个文件:FSBL 文件FSBL.elf,PMU 文件PMU.elf,bit流文件design_1_wrapper.bit,ATF文件bl31.elf,u-boot文件u-boot.elf。按照之前记录的路径导入。选择合适的目标路径Output Path
- FSBL
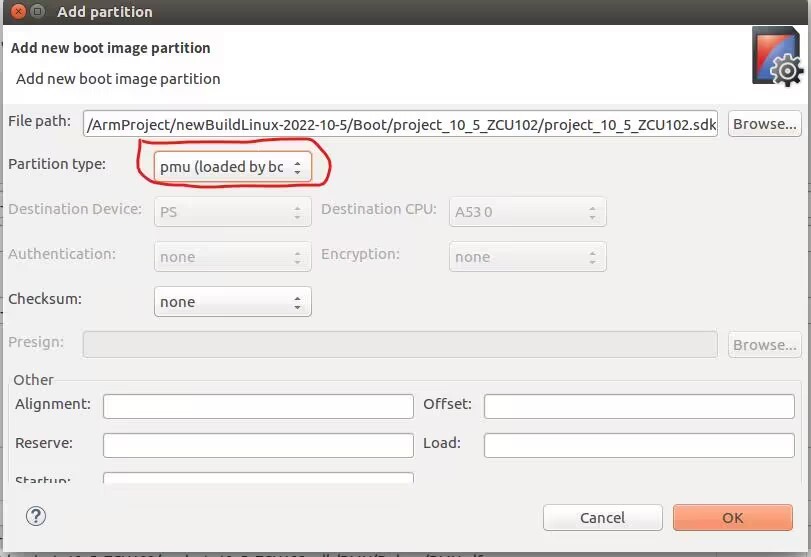
- PMU
- ATF
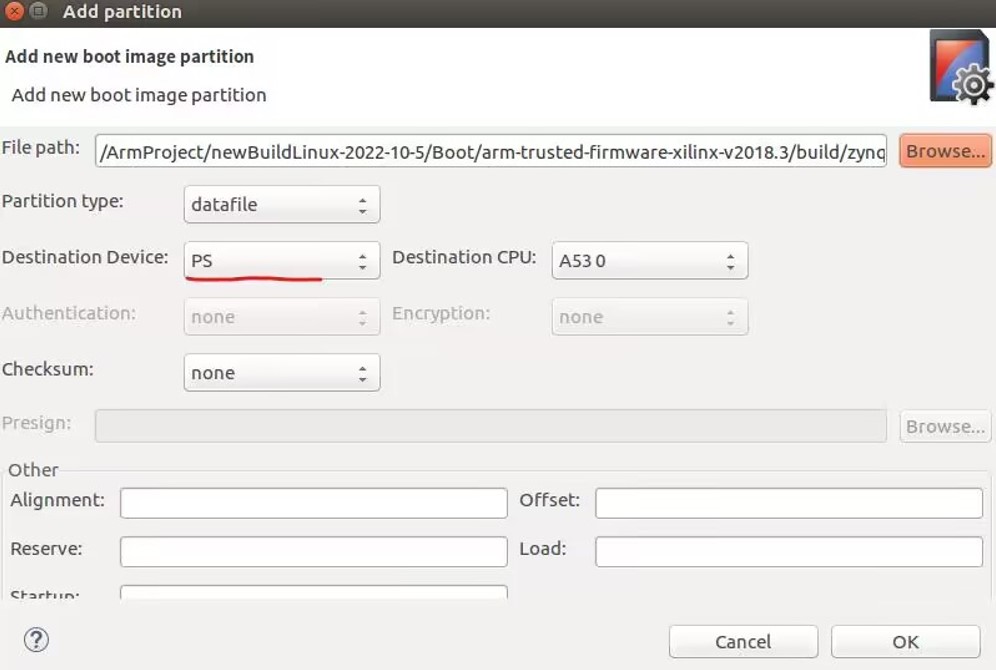
- Bitstream
- u-boot
- 准备完成
-
-
Create Image,可以发现目标路径Output Path中生成了output.bif与BOOT.bin文件,两个文件尚存在问题,需要先修改output.bif并用正确的output.bif生成正确的BOOT.bin
-
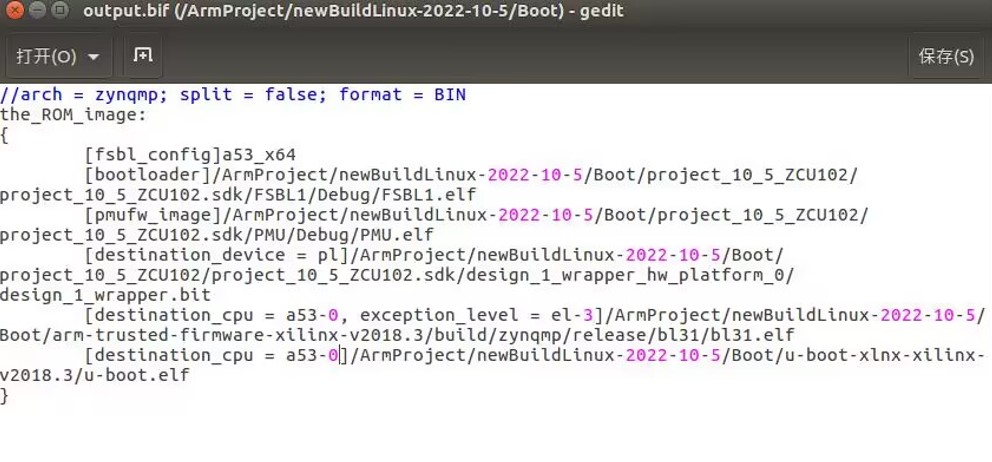
找到output.bif打开,按照这样修改:
- 修改前
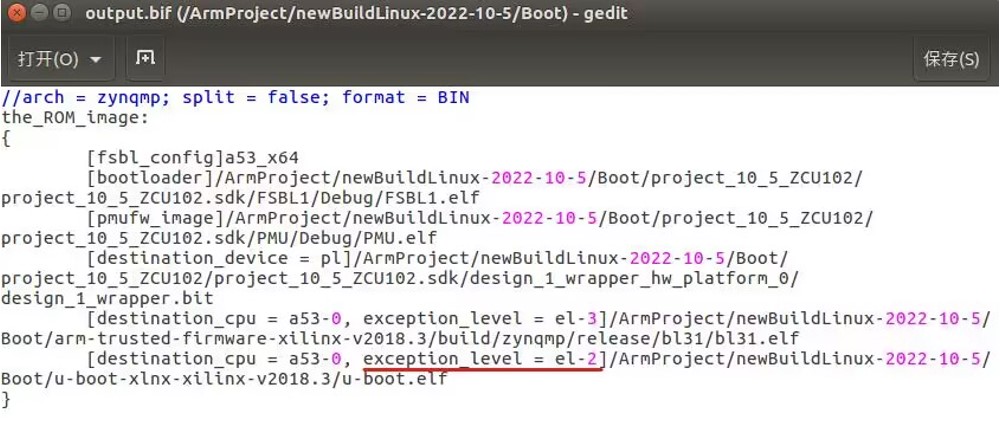
- 修改后
-
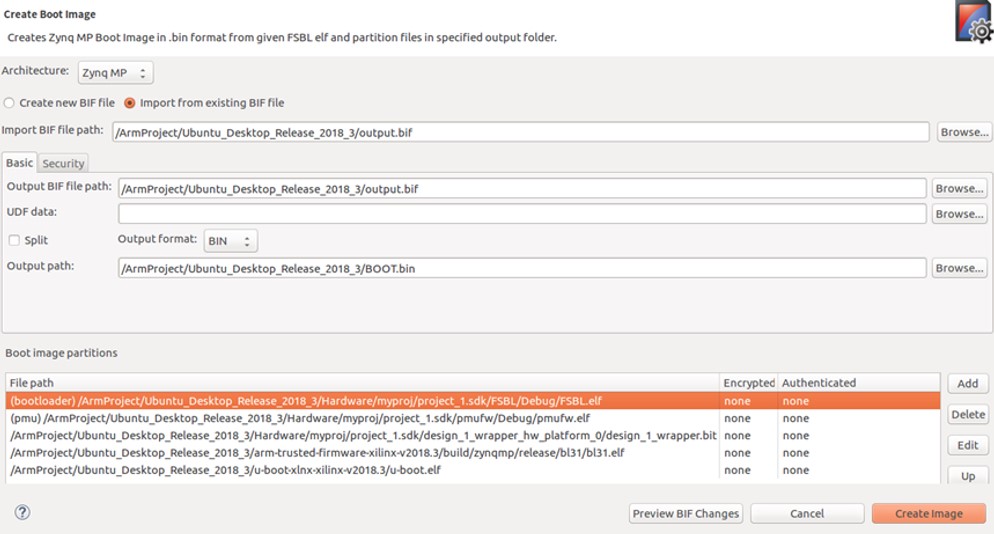
再次打开Xilinx->Create Boot Image,选择Import from existing BIF file,导入之前的output.bif,再一次Create Image,在目标路径Output Path得到BOOT.bin
-
-
DTC用于将SDK软件生成的.dts、.dtsi文件编译为.dtb文件
-
在链接网站下载dtc,放置在一个合适的路径下,本实验路径为/ArmProject/Ubuntu_Desktop_Release_2018_3/,下文以 /dirDTC 代替
- 进入/dirDTC目录,执行make命令。在执行过程中可能会遇到报错

暂时的解决办法是根据错误信息将
if ((int) ((yy_n_chars) + number_to_move) > YY_CURRENT_BUFFER_LVALUE->yy_buf_size
修改为
if ((unsigned int) ((yy_n_chars) + number_to_move) > YY_CURRENT_BUFFER_LVALUE->yy_buf_size)
编译完成后,可以在/dirDTC路径下发现可执行文件dtc.elf
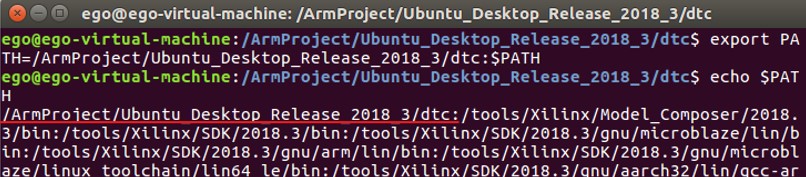
- 将当前路径添加到 $PATH 变量中。这里不推荐使用export命令因为在后续的步骤中才会使用到DTC,而使用export命令添加$PATH变量的效果是暂时的,关掉shell后就会失效。建议编辑.bashrc文件
vim ~/.bashrc,在文件末尾添加(路径根据自己的情况填写)
export PATH="/dirDTC /dtc:$PATH"
保存退出后输入命令source ~/.bashrc使添加立即生效。然后在使用export -p 或echo $PATH查看是否添加成功
- 使用SDK软件制作DTS/DTSI文件
- 从链接下载DTG,解压
-
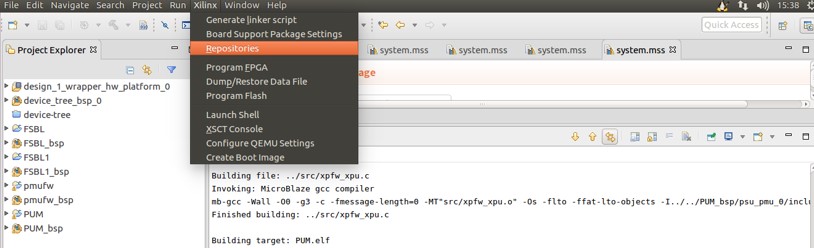
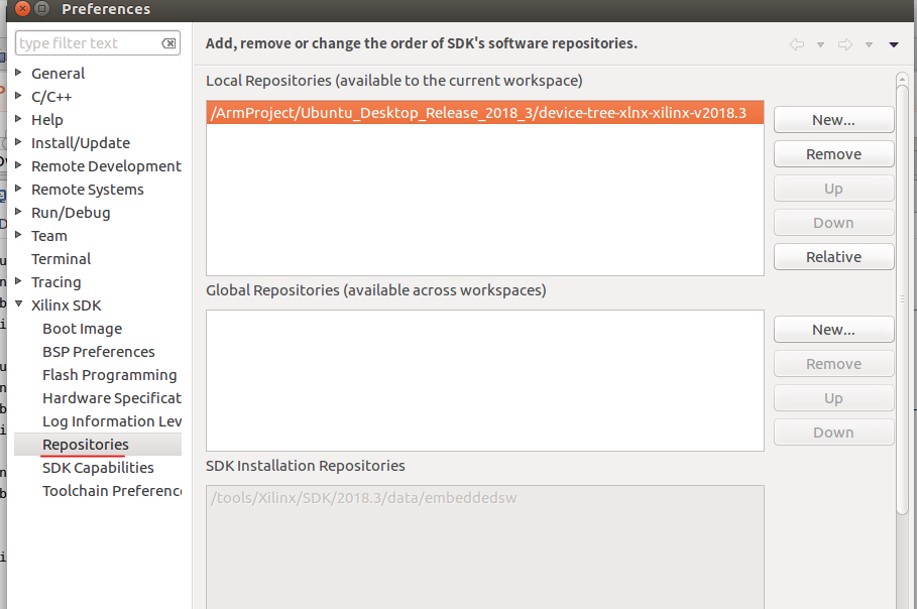
打开SDK-> Xilinx Tools > Repositories
-
点击New->选择DTG所在的目录->点击OK
-
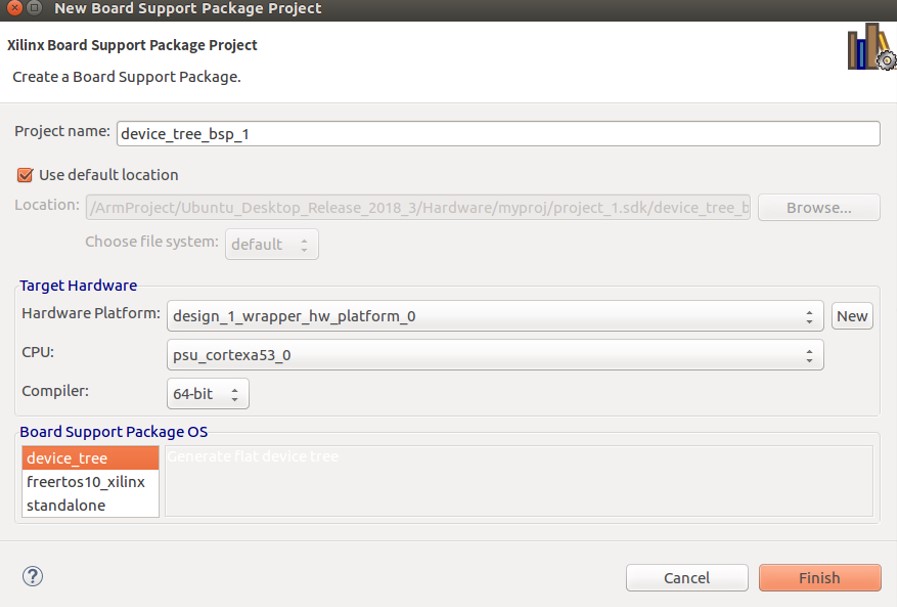
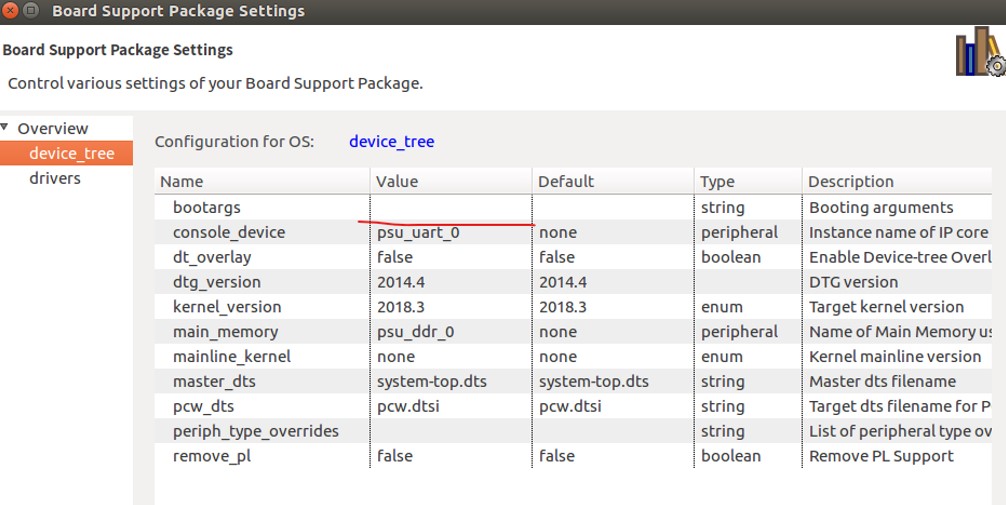
选项File->New->Board Support Package->Board Support Package OS: device-tree->Finish
-
在弹出的窗口中,在bootargs一栏输入如下内容,其他可保持不变,点击OK即可
console=ttyPS0,115200 root=/dev/mmcblk0p2 rw earlyprintk rootfstype=ext4 rootwait devtmpfs.mount=0
-
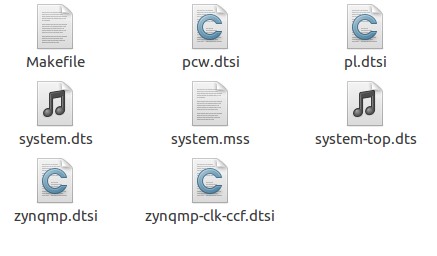
然后可以发现在当前目录下生成一个设备树文件夹,其中有数个.dts、.dtsi后缀文件
-
将files中的zcu102-rev1.0.dtsi的文件拷贝到设备树目录下,并且在system-top.dts文件中添加:
#include "zcu102-rev1.0.dtsi",如下图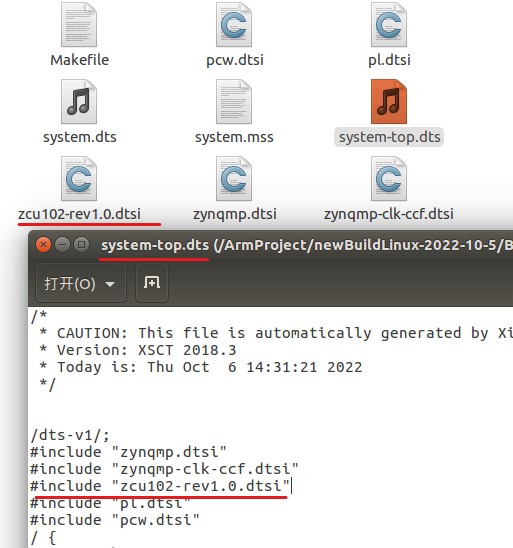
-
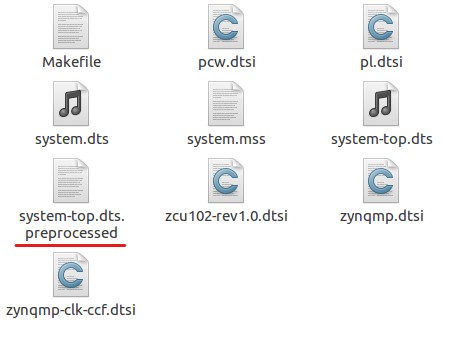
预处理.dts/.dtsi文件,执行如下命令,将归集dts文件到一个文件中,生成system-top.dts.preprocessed文件
cpp -nostdinc -I include -I arch -undef -x assembler-with-cpp system-top.dts system-top.dts.preprocessed
-
编译设备树,执行命令:
dtc -I dts -O dtb system-top.dts.preprocessed -o system.dtb生成DTB文件devicetree.dtb
-
编译完成后,终端中有如下输出

-
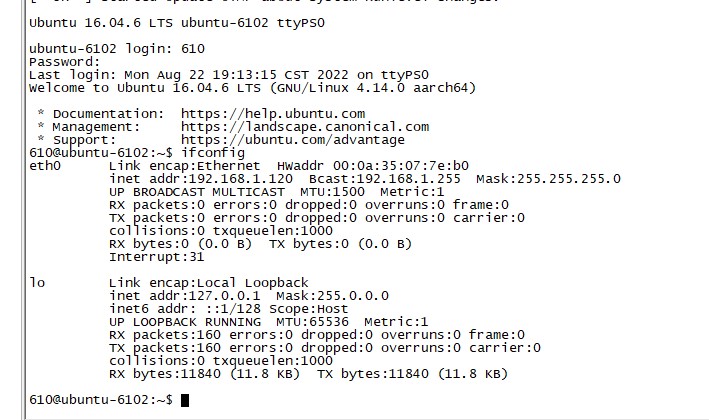
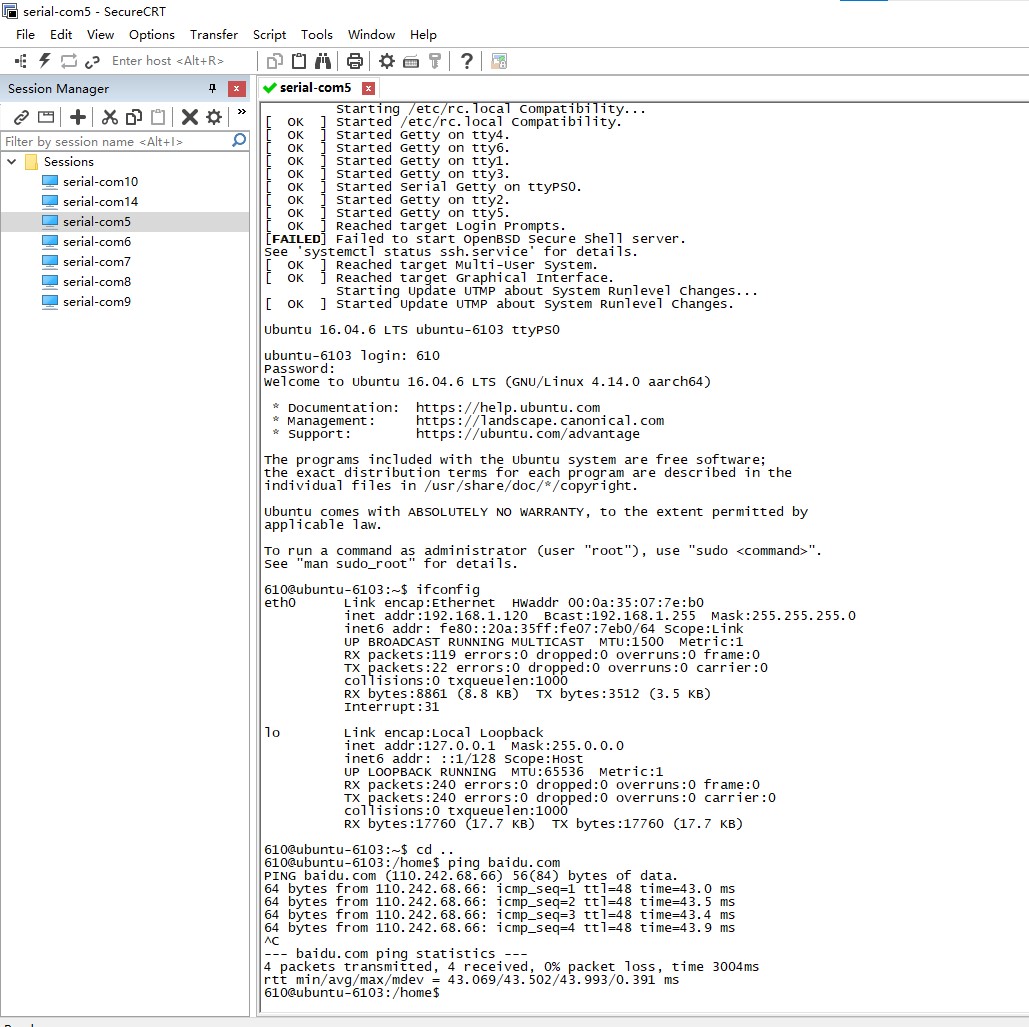
移植全部完成后的验证->若设备树文件正确,ifconfig后应观察到以太网卡eth0正常
-
-
配置内核,执行命令
make ARCH=arm64 xilinx_zynqmp_defconfig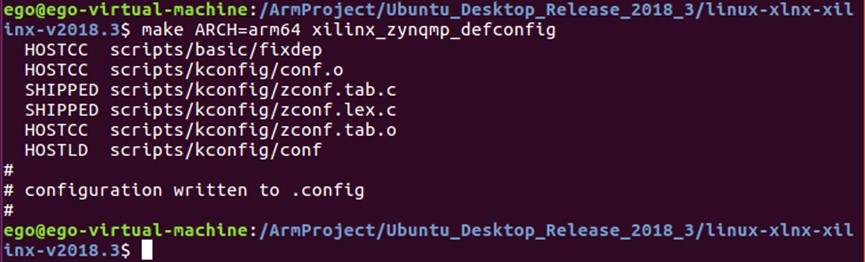
-
输入
make ARCH=arm64 menuconfig执行该命令后会进入图形化的配置界面,暂时保持默认设置,直接exit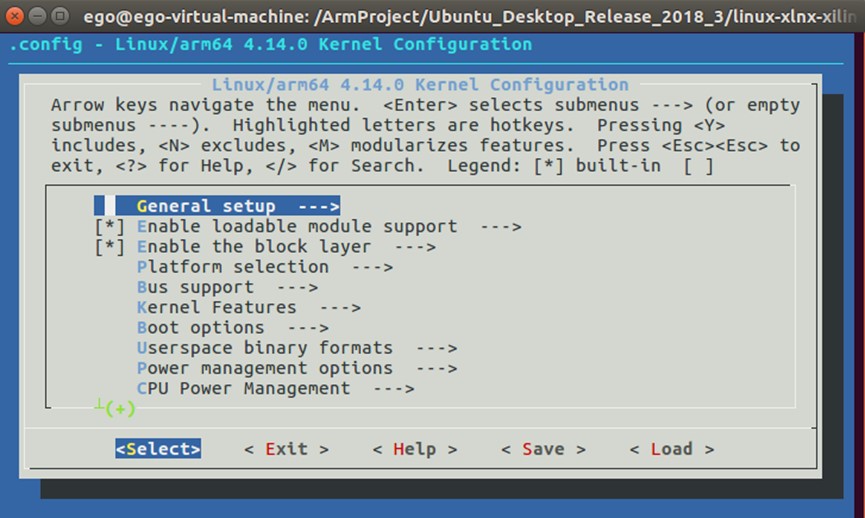
-
配置交叉编译路径
export CROSS_COMPILE=aarch64-linux-gnu- -
编译内核
make ARCH=arm64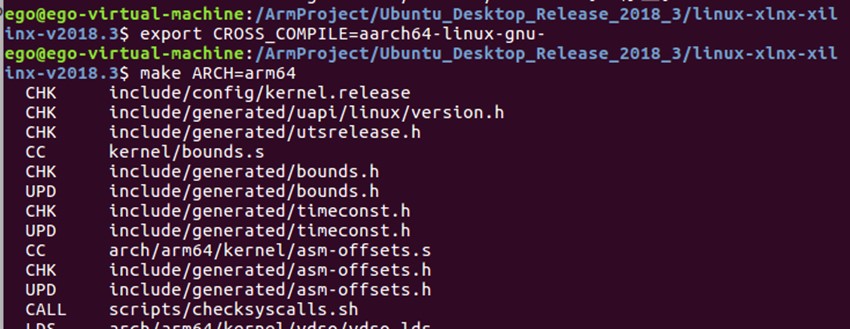
-
编译完成后,可以在./linux-xilinx-v2018.3/arch/arm64/boot发现可执行文件Image.elf

- 从官网下载ubuntu-base-arm64压缩文件。注意一定要下载arm64版本的
- 新建目录:
mkdir ubuntu-rootfs模拟存放将要放置于SD卡文件系统分区的文件 - 将下载来的压缩文件解压到新建的目录中:
tar xvf ubuntu-base-16.04.6-base-arm64.tar.gz -C ./ubuntu-rootfs
-
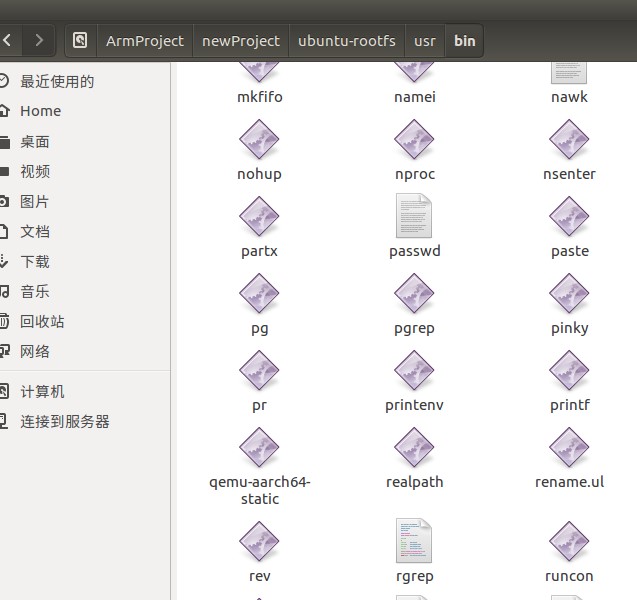
安装qemu-user-static(此处安装到/usr/bin/目录下):
sudo apt-get install qemu-user-static这是由于我们的开发机是x86架构的。如果想要制作适用于ARM的文件系统,就需要下载 qemu-user-static 来模拟arm环境 -
进入之前创建的ubuntu-rootfs/路径下,将qemu-aarch64-static复制到ubuntu-rootfs/usr/bin
cp /usr/bin/qemu-aarch64-static ./usr/bin
-
将本机的DNS配置文件复制到ubuntu-rootfs/etc/, 这样进入chroot环境后才能正常访问网络
cp -b /etc/resolv.conf ./etc/
-
修改ubuntu-rootfs/tmp/文件权限:
chmod 777 ./tmp
这是为了进入chroot环境后可以正常的更新软件源。如果跳过该步在更新软件源时会遇到signature verification error的问题,导致无法更新软件源。之后执行命令
cd ..切换到ubuntu-rootfs/的上级目录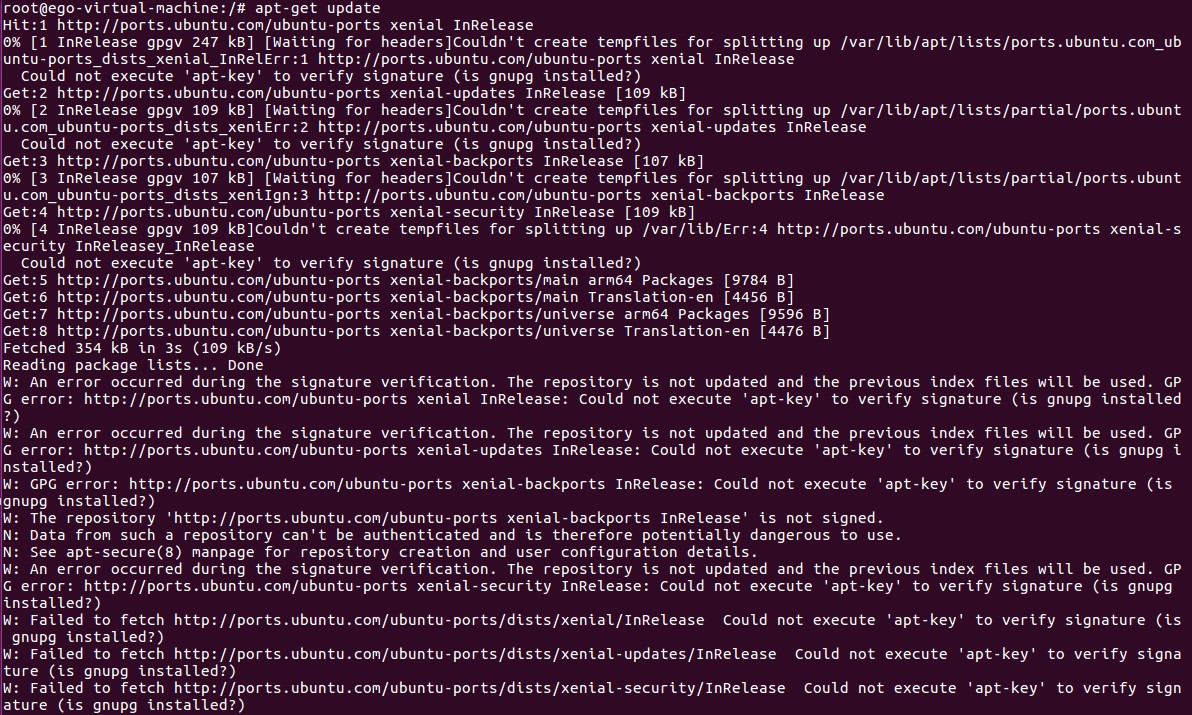
-
挂载ubuntu-rootfs,进入chroot环境,此处需要一个脚本文件
ch-mount.sh,放在ubuntu-rootfs的上级目录,其具体内容见 filessudo bash ch-mount.sh -m ubuntu-rootfs/
接下来的步骤都是在此虚拟环境中进行,直到退出chroot环境
-
挂载后更新软件源:
apt-get updateapt-get upgrade -
安装必要的工具包:
apt-get install sudo apt-get install vim apt-get install language-pack-en-base apt-get install language-pack-zh-hans-base apt-get install dialog apt-get install ssh ethtool iputils-ping net-tools ifupdown
在安装language-pack-en-base后需要配置local文件:
vim /etc/default/locale LANG="en_US.UTF-8" LANGUAGE="en_US:en" LC_ALL="en_US.UTF-8"
-
添加用户:
useradd -s '/bin/bash' -m -G adm,sudo 610 echo "Set password for 610:" passwd 610
将用户“610”的密码设置为610
echo "Set password for root:" passwd root
将root 的密码设置为 root
-
设置主机名与入口ip
echo 'ubuntu-610' > /etc/hostname echo "127.0.0.1 localhost" >> /etc/hosts echo "127.0.1.1 ubuntu-610" >> /etc/hosts
-
配置登录的串口(关键)
cp /lib/systemd/system/[email protected] /lib/systemd/system/[email protected] vim /lib/systemd/system/[email protected]
ln -s /lib/systemd/system/[email protected] /etc/systemd/system/getty.target.wants/[email protected]
-
配置网络
echo auto eth0 > /etc/network/interfaces.d/eth0 echo iface eth0 inet dhcp >> /etc/network/interfaces.d/eth0
-
设置自动更新DNS
apt-get install resolvconf dpkg-reconfigure resolvconf
会弹出configuring resolvconf等窗口,都直接选退出
-
设置时区
apt-get install tzdata dpkg-reconfigure tzdata
弹出窗口,按需选择即可
-
退出chroot环境,取消挂载
exit sudo bash ch-mount.sh -u ubuntu-rootfs/
- 将ubuntu-rootfs路径下全部内容拷贝到SD卡(其中/media/ego/RootFS路径可以在主机/虚拟机文件系统目录左侧“计算机”位置附近“RootFs”处找到,右键->属性,“ego”为本实验用户名,请实验者替换成自己的用户名)
至此,RootFS相关文件也已准备完毕。包含整个Linux系统和文件系统的SD卡内容已齐全,可以上板验证 回到顶部
sudo rsync -avSH (自己的ubuntu-rootfs上级路径)/ubuntu-rootfs/* /media/ego/RootFS
-
插入SD卡上电,发现文件系统可以启动并登录
上电时要插上网线,因为启动过程中会拉起网口,如果不插网线会等待5分钟再跳过该步骤,导致启动变慢(后续可以设置缩短等待时间)
-
可以执行ifconfig、ping命令查看网卡设备是否正常工作
-
登录后进行更新软件、安装工具包network-manager、 rsyslog。这两个工具包具有网络设备管理、系统日志管理的功能,是十分必要的工具包
-
编写一个简单的C++程序,编译生成可执行文件并运行