This project enables GPU-accelerated LIDAR simulation for robotics.
- Open 3D Engine - an open source game & simulation engine. O3DE is extendable through modules called Gems. This is one of such Gems.
- LIDAR - a type of active sensor used in robotics, emitting and receiving back laser beams.
- Robot Operating System (ROS) - an open source middleware and de facto standard for robotics.
- ROS2 Gem - an open source module for O3DE which enables simulation for robotics using modern ROS.
- Robotec GPU Lidar - an open source library for simulating LIDAR through raycasting based on GPU with CUDA and OptiX.
The O3DE Robotec GPU Lidar Gem is a module working with O3DE ROS2 Gem and extending it with a fast and scalable LiDAR implementation by making use of the Robotec GPU Lidar library.
Combined with the O3DE ROS2 Gem's Lidar Sensor Component the O3DE RGL Gem allows for creation of a configurable,
high - performance LiDAR. The Gem provides a faithful representation of the simulated environment by supporting the
following visuals:
- Mesh Component
- Terrain created using the O3DE Terrain Gem
- Actor Component
and providing the following features:
- Gaussian Noise
- Point cloud intensity data

You can fully customize the LiDAR's settings using the O3DE Level Editor. Those include properties like:
- configurable raycasting pattern
- lidar range
- entities excluded from raycasting
- lidar noise
You can also choose one of the presets provided by the ROS2 Gem to create a LiDAR model that fits your needs.

-
Any O3DE project with the O3DE ROS2 Gem enabled.
-
The following ROS2 packages installed on your system:
cyclonedds,fastrtps,radar-msgs.
You can install those packages with the following commands:
sudo apt install -y ros-${ROS_DISTRO}-cyclonedds ros-${ROS_DISTRO}-rmw-cyclonedds-cpp sudo apt install -y ros-${ROS_DISTRO}-fastrtps ros-${ROS_DISTRO}-rmw-fastrtps-cpp sudo apt install -y ros-${ROS_DISTRO}-radar-msgs
IMPORTANT: You do not need to download or set up the RobotecGPULidar library itself and only have to meet the RUNTIME requirements.
-
Clone the Gem's repository.
git clone https://github.com/RobotecAI/o3de-rgl-gem.git
-
Switch to the correct branch.
Depending on which version of O3DE and ROS2 gem you use this step may differ. Below is a table of supported build combinations:o3de-rgl-gem o3de/o3de-extras Robotecai/o3de-extras o3de development branch development branch N/A development branch development branch N/A rgl/stable-dev branch Release 2310.3 main branch, O3DE_2409 tag Release 2409.x N/A Release 2409.x main branch, O3DE_2310 tag Release 2310.x N/A Release 2310.x Note: This table describes build combinations that are guaranteed to work. There may exist other working build combinations.
-
Register the Gem.
You can either register the gem through the Command Line Interface or the O3DE Project Manager:- CLI
Head to your local O3DE engine directory (o3de-dir) and register the gem using its path (gem-path).cd <o3de-dir> ./scripts/o3de.sh register --gem-path <gem-path>
- Project Manager
Open the Project Manager. Select Gems -> Add Existing Gem. Locate the gem's directory and select Choose.
- CLI
-
Enable the Gem in your project.
Once again you can either enable it through the Command Line Interface or the O3DE Project Manager:Note: Please, make sure to enable the ROS2 Gem first.
- CLI
In your local o3de engine directory you can enable the gem for your project (project-path)../scripts/o3de.sh enable-gem -gn RGL -pp <project-path>
- Project Manager
Open your project. Select File -> Edit Project Settings -> Configure Gems. Now, search for the Robotec GPU Lidar Gem and enable it.
- CLI
-
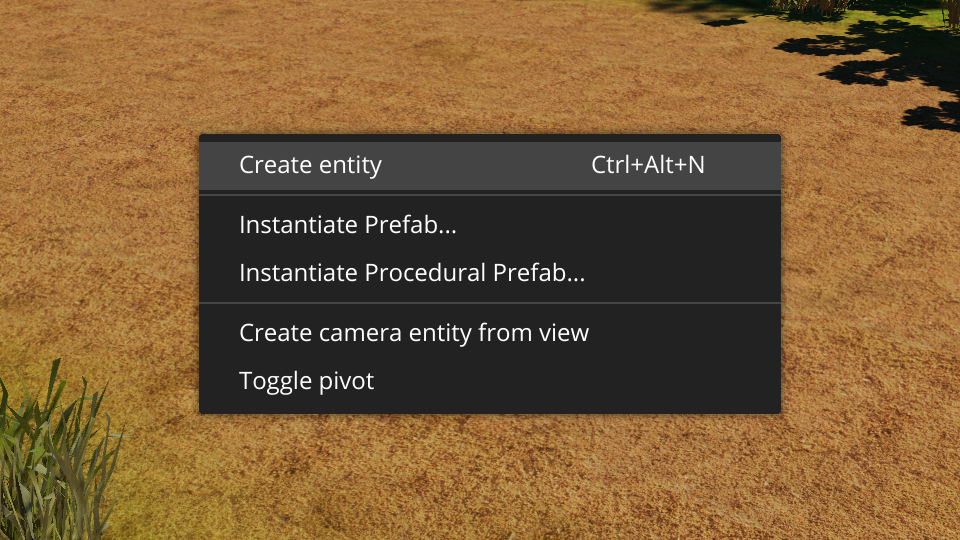
Create an entity with a
ROS2 Lidar Sensorcomponent.Within your O3DE project add a new entity by right - clicking on the viewport and selecting Create entity.
Select the newly created entity within the Entity Outliner. Next, within the Entity Inspector select Add Component. Then, search for
ROS2 Lidar Sensorand add it to your entity using the left mouse button.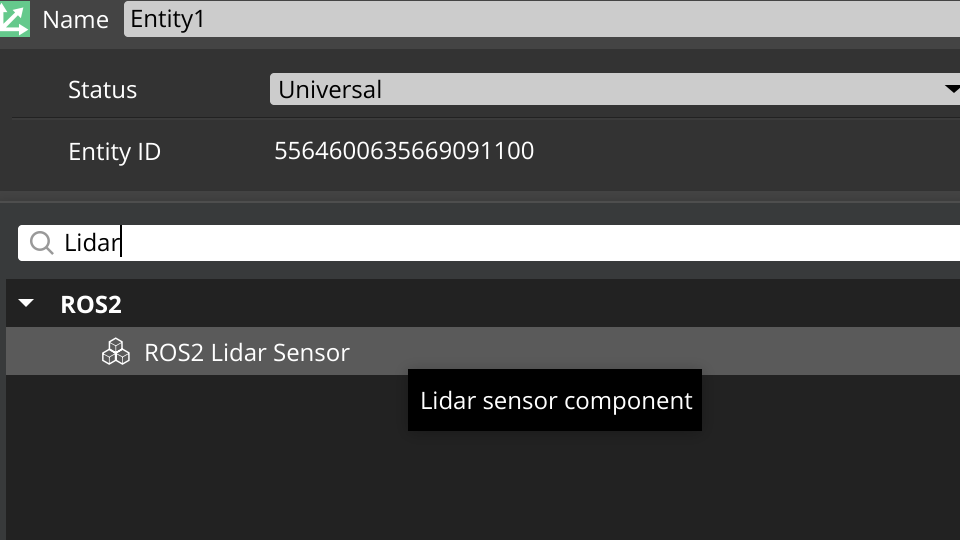
Note: You need to add the required
ROS2 Framecomponent as well. -
Select
RobotecGPULidaras your LiDAR implementation.In the Entity Inspector find the
ROS2 Lidar Sensorcomponent and change the Lidar Implementation toRobotecGPULidar.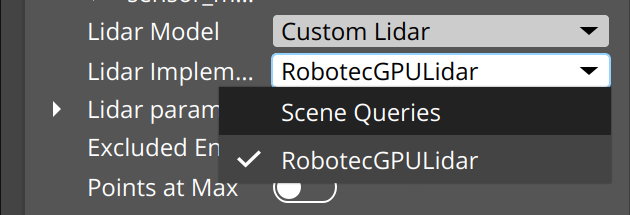
Note: If you do not see the
RobotecGPULidarimplementation, please make sure you followed the Setup instructions correctly. -
Customize your LiDAR.
After following through all previous instructions, you can customize the
ROS2 Lidar Sensorcomponent in the Entity Inspector to fit all your needs.



The RGL gem allows for global scene configuration. To achieve this:
-
Add the
RGL Scene Configurationcomponent to theLevelentity.The Level entity is the root entity, and it can be found in the uppermost section of the Entity Outliner. In the Entity Inspector select Add Component . Then search for the
RGL Scene Configurationcomponent and add it to the entity. -
Customize the scene configurations.
In the Entity Outliner, under the
RGL Scene configurationcomponent parameters, you can customizez the global scene configuration to fit your needs.
If you encounter any issues relating the libRobotecGPULidar.so file please follow these steps:
- Delete the
Code/3rdParty/RobotecGPULidar/directory. - If you encounter the
DOWNLOAD_RGLfile under theCode/directory, delete it. - Reload the CMake project.
One common issue is when the lidar detects unwanted geometry as shown below.

You can fix this with the following steps:
-
Locate the
Excluded Entitiessection in theROS2 Lidar Sensorcomponent properties.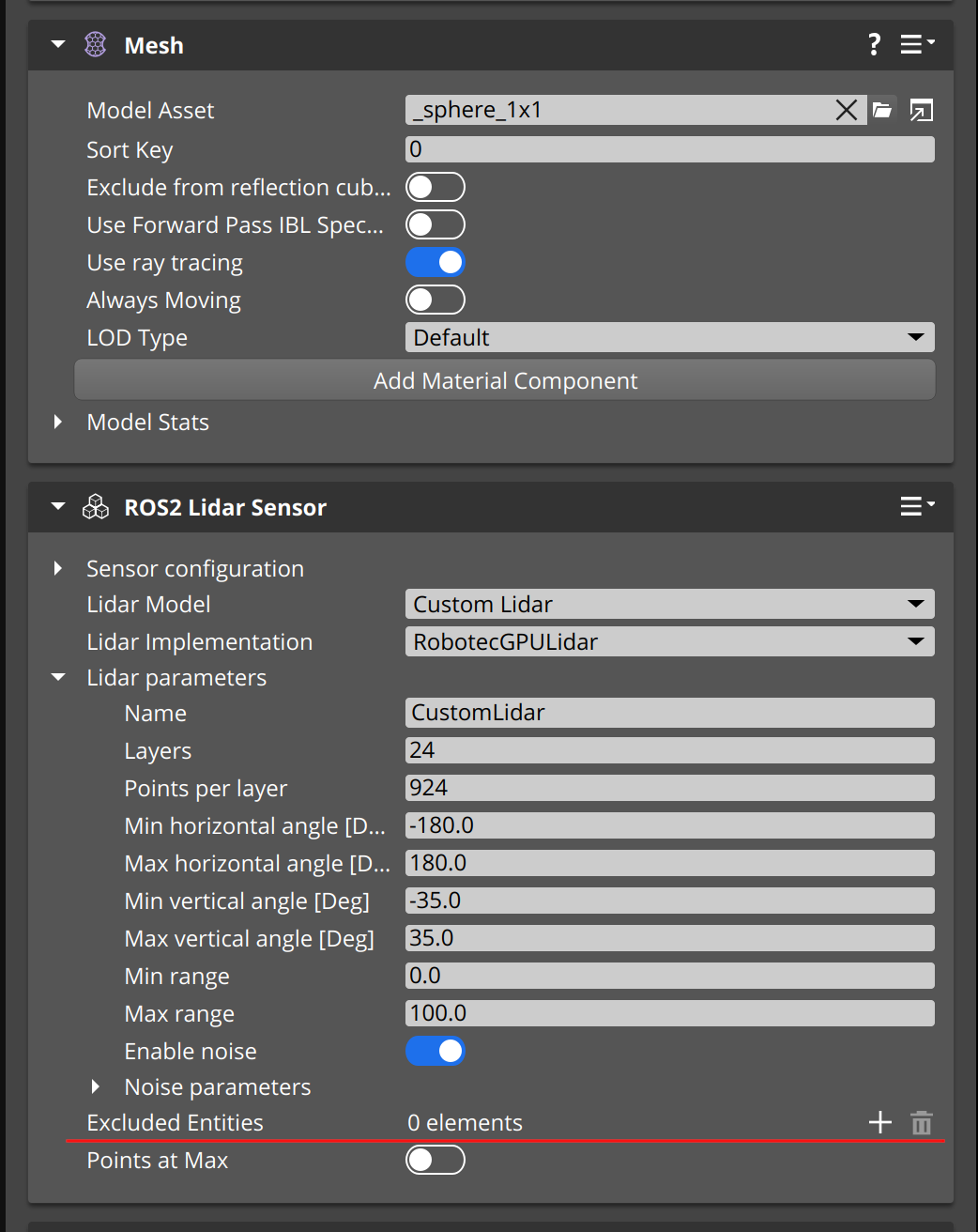
-
Add a new excluded entity. You can select it in the Viewport or in the Entity Outliner.
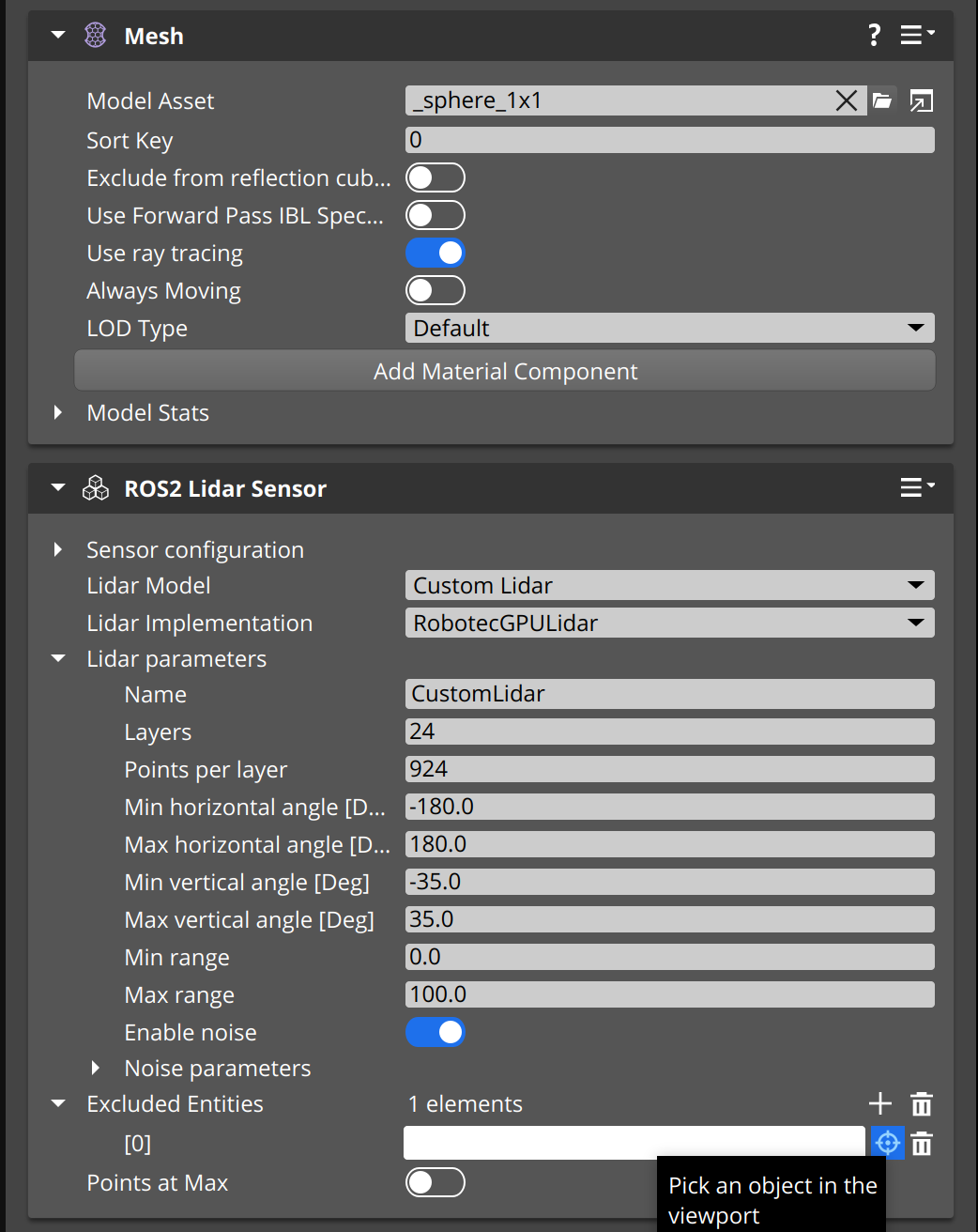


{kind=link}
The entity's name should appear in the Excluded Entities list (as seen on the image below).

If this section does not seem to help, feel free to post an issue on the gem's github repository in which you describe the problem you are facing.