Этот репозиторий является форком исходного репозитория userland.
Весь репозиторий нужен фактически для работы с одним исходником - farvcam.c, который находится в директории host_applications/linux/apps/raspicam/farvcam.c. Код создан на базе программ raspivid.c, raspistill.c, а также с помощью советов на форумах raspberry pi и stackoverflow.
Исходник farvcam.c является ключевой программой для видеорегистратора farvater и имеет следующие функции:
- Запись видео по состоянию цифрового выхода телематического терминала CAN-WAY.
- Получение фотоснимка по запросу терминала и передача фотографии на сервер мониторинга (например Wialon IPS).
- Сохранение фотографий и видео на SD-карте расберри, при этом файлы сохраняются в папке, работающей как образ флеш-накопителя.
- Ограничение количества сохраняемых фото и видео. Если количество фото/видео превышает заранее установленный предел, новые медиафайлы начинают перезаписывать старые, начиная с самого первого.
Разрешение видео по умолчанию - 1920 на 1080. Получение фотографии можно выполнять одновременно с записью видео, поскольку фактически используется кадр из видеопотока. Поэтому фотография имеет такое же разрешение, как и видео (1920 на 1080). Программа ещё сырая и многие вещи в ней еще не доделаны и не проверены.
Вся работа с проектом ведётся с помощью CMake в среде VScode (с расширением CMake). Версия CMake на момент написания README.md - 3.17.3.
Для работы с исходником с помощью кросс-компиляции нужно сделать следующие основные шаги.
Для данного проекта использовался следующий toolchain: https://github.com/Pro/raspi-toolchain
Чтобы получить и установить toolchain нужно следовать инструкции варианта Build the toolchain from source. После этого должен установиться С компилятор /opt/cross-pi-gcc/bin/arm-linux-gnueabihf-gcc-8.3.0.
Нужно установить библиотеку pigpio в расберри, поскольку она используется в farvcam.c. Ссылка на инструкцию по установке https://abyz.me.uk/rpi/pigpio/download.html.
Этот пункт нужно выполнять в соответствии с этой инструкцией Cross Compiler CMake Usage Guide with rsynced Raspberry Pi 32 bit OS. При этом шаги 1-3 из раздела Steps/Settings for Host Machine (PC/Laptop) можно пропустить, потому что мы уже настроили toolchain на предыдущем шаге. Также стоит отметить, что шаг 8. Setup Important Symlinks может сработать не совсем верно (не факт что потом проект соберётся), поэтому вместо команд на шаге 8 нужны эти:
sudo ln -sf /usr/include/arm-linux-gnueabihf/asm/* /usr/include/asm/
sudo ln -sf /usr/include/arm-linux-gnueabihf/gnu/* /usr/include/gnu/
sudo ln -sf /usr/include/arm-linux-gnueabihf/bits/* /usr/include/bits/
sudo ln -sf /usr/include/arm-linux-gnueabihf/sys/* /usr/include/sys/
sudo ln -sf /usr/include/arm-linux-gnueabihf/openssl/* /usr/include/openssl/
sudo ln -sf /usr/lib/arm-linux-gnueabihf/crtn.o /usr/lib/crtn.o
sudo ln -sf /usr/lib/arm-linux-gnueabihf/crt1.o /usr/lib/crt1.o
sudo ln -sf /usr/lib/arm-linux-gnueabihf/crti.o /usr/lib/crti.o
Также в этой инструкции нам не нужны пункты с созданием проекта, поскольку проект уже есть (useland).
Стоит отметить, что мне удавалось делать кросс-компиляцию userland без указанной инструкции; использовались шаги из этой ссылки - второй ответ Building for newer Raspbian Debian Buster images and ARMv6. Однако инструкция Cross Compiler CMake Usage Guide with rsynced Raspberry Pi 32 bit OS всё-таки предпочтительнее, поскольку в ней есть исправление symlinks с помощью питоновского скрипта.
Важный файл тулчейна https://github.com/Pro/raspi-toolchain - Toolchain-rpi.cmake, без него ничего собираться не будет. В нём необходимо добавить путь к директории rootfs, в которую копировались все системные файлы расберри из предыдущего шага. Для этого нужно добавить следующую строку в файл Toolchain-rpi.cmake:
set(ENV{RASPBIAN_ROOTFS} "$HOME/Projects/raspberrypi/rootfs") # здесь нужно указать путь к директории rootfsперед условием if("$ENV{RASPBIAN_ROOTFS}" STREQUAL "").
Также нужно добавить строку
set(ENV{RASPBERRY_VERSION} 1)в самом начале файла.
Сам файл Toolchain-rpi.cmake можно расположить в любом месте, хотя правильнее перенести его в директорию makefiles/cmake/toolchains.
В среде VScode для конфигурации проекта необходимо открыть папку userland. Для удобства настройки проекта используется файл cmake-kits.json, в котором прописан компилятор и тулчейн. Если собирать проект без привязки к VScode то нужно при запуске CMake указывать путь к тулчейн файлу и путь к компилятору. Для этого сначала нужно создать папку build и перейти в неё:
mkdir build
cd build
Затем нужно выполнить такую команду (это еще надо проверить):
/usr/local/bin/cmake --no-warn-unused-cli -DCMAKE_EXPORT_COMPILE_COMMANDS:BOOL=TRUE -DCMAKE_BUILD_TYPE:STRING=Debug -DCMAKE_C_COMPILER:FILEPATH=/opt/cross-pi-gcc/bin/arm-linux-gnueabihf-gcc-8.3.0 -DCMAKE_TOOLCHAIN_FILE:FILEPATH=toolchain_path/Toolchain-rpi.cmake ..
Однако эта команда выдаст ошибку, что не удалось найти библиотеку pigpio. Чтобы CMake смог найти эту библиотеку необходимо создать файл pigpioConfig.cmake со следующим содержимым:
################################################################################
### Find the pigpio shared libraries.
################################################################################
# Find the path to the pigpio includes.
find_path(pigpio_INCLUDE_DIR
NAMES pigpio.h pigpiod_if.h pigpiod_if2.h
HINTS /home/xbron/Projects/raspberrypi/rootfs/usr/local/include) # указывается путь к include, где установлены заголовочные файлы в rootfs
# Find the pigpio libraries.
find_library(pigpio_LIBRARY
NAMES libpigpio.so
HINTS /home/xbron/Projects/raspberrypi/rootfs/usr/local/lib) # указывается путь к lib, где установлены файлы библиотеки в rootfs
find_library(pigpiod_if_LIBRARY
NAMES libpigpiod_if.so
HINTS /home/xbron/Projects/raspberrypi/rootfs/usr/local/lib) # указывается путь к lib, где установлены файлы библиотеки в rootfs
find_library(pigpiod_if2_LIBRARY
NAMES libpigpiod_if2.so
HINTS /home/xbron/Projects/raspberrypi/rootfs/usr/local/lib) # указывается путь к lib, где установлены файлы библиотеки в rootfs
# Set the pigpio variables to plural form to make them accessible for
# the paramount cmake modules.
set(pigpio_INCLUDE_DIRS ${pigpio_INCLUDE_DIR})
set(pigpio_INCLUDES ${pigpio_INCLUDE_DIR})
# Handle REQUIRED, QUIET, and version arguments
# and set the <packagename>_FOUND variable.
include(FindPackageHandleStandardArgs)
find_package_handle_standard_args(pigpio
DEFAULT_MSG
pigpio_INCLUDE_DIR pigpio_LIBRARY pigpiod_if_LIBRARY pigpiod_if2_LIBRARY)Далее этот файл нужно поместить в директорию cmake папки rootfs, $HOME/Projects/raspberrypi/rootfs/usr/local/lib/cmake/.
При этом есть вероятность, что собрать проект всё равно не удастся. Тогда нужно удалить все файлы в build и попробовать снова. Если ошибок нет, то следует далее ввести команду make farvcam, находясь в папке build.
В VScode с расширением CMake необходимо выбрать цель (target) farvcam и затем нажать Build. При этом CMake может поругаться, что не может найти pigpio, тогда нужно в VScode нажать Сtrl+Shift+P и выбрать CMake: Clean, после чего попробовать снова собрать проект.
Большая часть кода написана на базе библиотеки MMAL. В программе используются следующие компоненты MMAL:
MMAL_COMPONENT_DEFAULT_CAMERA,MMAL_COMPONENT_DEFAULT_SPLITTER,MMAL_COMPONENT_DEFAULT_IMAGE_ENCODER,MMAL_COMPONENT_DEFAULT_VIDEO_ENCODER,
Схема соединений этих компонентов показана на рисунке ниже. Этот подход взят из библиотекиpicamera: picamera docs.
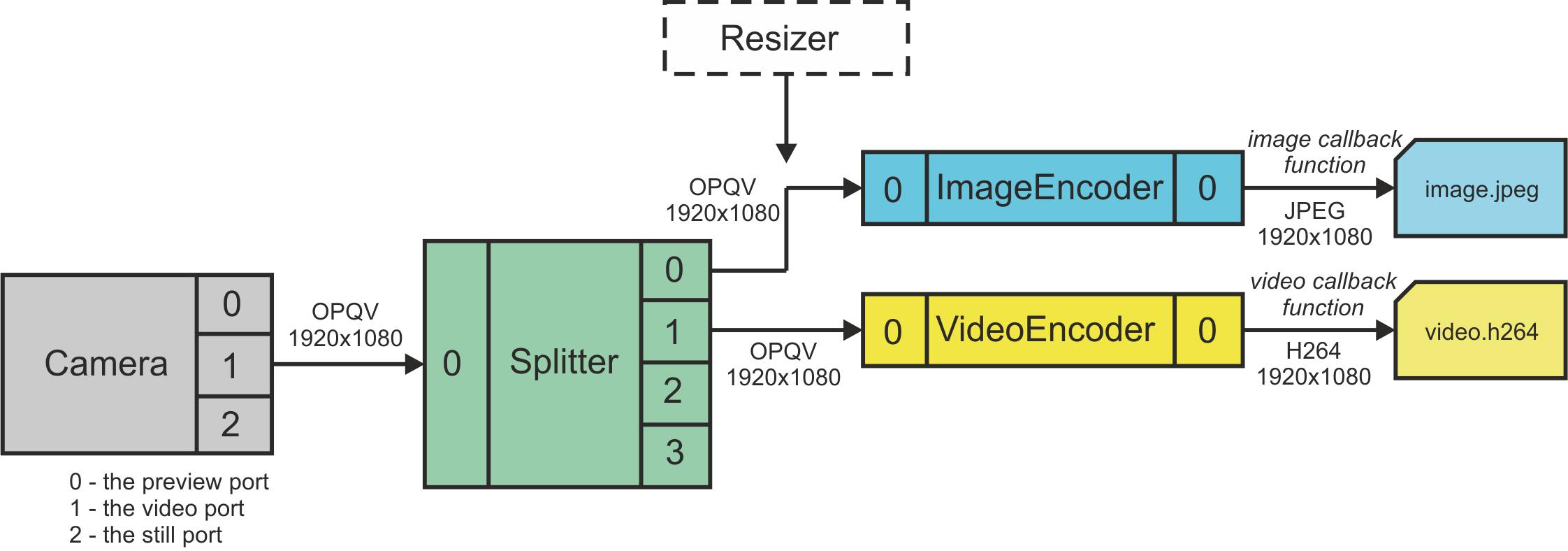
Для получения фотоснимков во время записи видео используется компонент Splitter, вход которого подключается к видеопорту компонента Camera (выход №1), при этом формат входа Splitter копирует формат видеопорта. Форматы двух выходов Splitter скопированы с его входа. К одному выходу Splitter подключен энкодер для изображений (ImageEncoder), к другому - энкодер для видео (VideoEncoder). К выходам энкодеров подключены соответствующие callback_functions, которые формируют полезные данные (фото и видео).
Такой подход с использованием Splitter позволяет одновременно записывать видео и снимать фото, поскольку фотография представляет собой кадр видеопотока. Однако при этом качество изображения получается хуже, чем если бы для этой же цели использовался порт Still камеры. Ещё одна проблема этого подхода заключается в том, что разрешение фотографии получается точно таким же, как и разрешение кадра видео (1920 на 1080 в настоящее время). Поэтому с получением фото другого разрешения возникают проблемы. Потенциально можно использовать компонент Resizer, что показано на схеме выше. Однако тестовое применение этого компонента (он вставляется между Splitter и ImageEncoder) было не очень успешным: иногда фотографии на выходе энкодера дублировались.
Есть другой способ: не использовать Splitter, а получать фотоснимки с порта 2 камеры - Still port. Этот вариант тоже тестировался, однако здесь проблемы ещё серьёзнее. Если во время видеозаписи сделать фотоснимок, видеозапись останавливается и больше не возобновляется (несмотря на разные ухищрения типа ручной паузы записи видео и ручного возобновления). Это связано с тем, что камера должна менять режим съёмки для получения фото, что описано в документации к библиотеке picamera. При этом в Интернете многие пишут, что снятие фото во время видеозаписи возможно, но некоторые кадры могут быть потеряны. В моём же случае не удалось даже возобновить запись видео.