- 设定角度和距离并发射出去(可完成基础题全部)
- 根据红色引导自动寻靶,超声波自动测距射击(可完成发挥一)
- 摇头时找靶射击(发挥二)
- 实现高射和低射切换(算是其他发挥部分?)
- 关于建了模的反思:最简单和实用的方法是直接试验构建个射出的距离和俯仰舵机pwm对应的线性表,之后可直接查表也和拟合出函数;但我比赛时我傻了,设定炮弹只受重力以及忽略炮管长度,则射出距离
(
是炮管仰角)
和
成正比,比例为
,先试验出
- 机械结构:1、我们炮管没找到合适内径的硬管子,最后用的纸管。。。发射炮弹时比较抖 2、*云台被队友踩了一脚,纠正过来后还有一点歪。。。 3、炮管的根部和云台左右转动的轴心相差了1cm,发现时距离封箱还有4、5小时,这是最大的错误,所以咋可能射的准嘛(之前一直调,重复性都很低)
- 这次比赛比较好的是:在单片机上加入了RT-Thread操作系统的内核,向系统中加入功能变得简单多了,写程序更快了,运行的也稳定,调试也方便(第二天软件就基本 写完了)
- 俯视图:

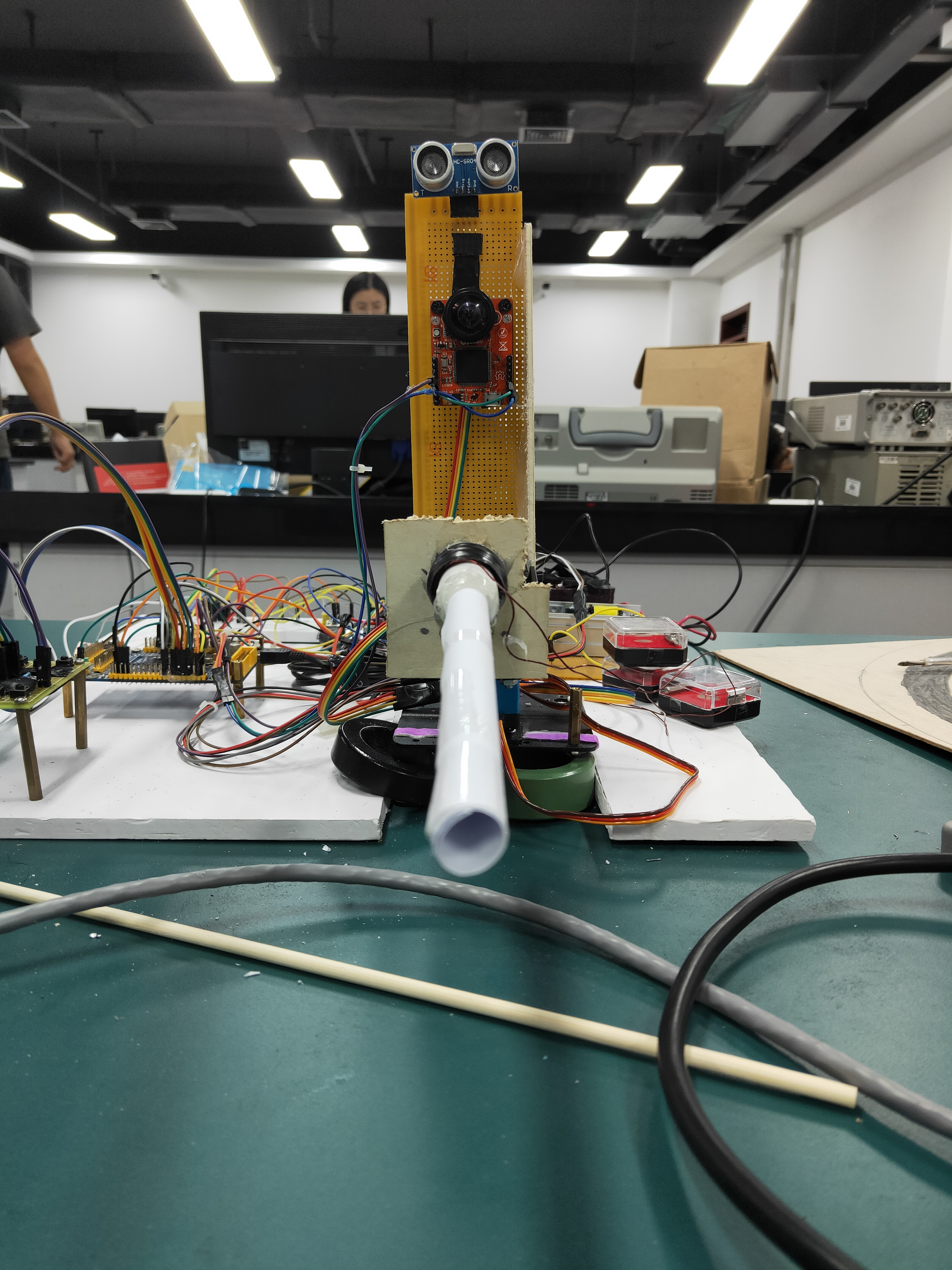
- 正视图:
- 视频: 慢动作视频下载