- Complementarity-Free Multi-Contact Modeling and Optimization for Dexterous Manipulation
- Author: Wanxin Jin
- Preprint: https://arxiv.org/abs/2408.07855
- Youtube: https://www.youtube.com/watch?v=NsL4hbSXvFg
- Motivation: to enable model-based planning/control to compete with or even surpass the reinforcement learning in solving challenging dexterous manipulation.
- Technical contribution: complementarity-free multi-contact modeling and optimization method, effective for contact-interaction prediction and optimization-friendly for contact-rich planning.
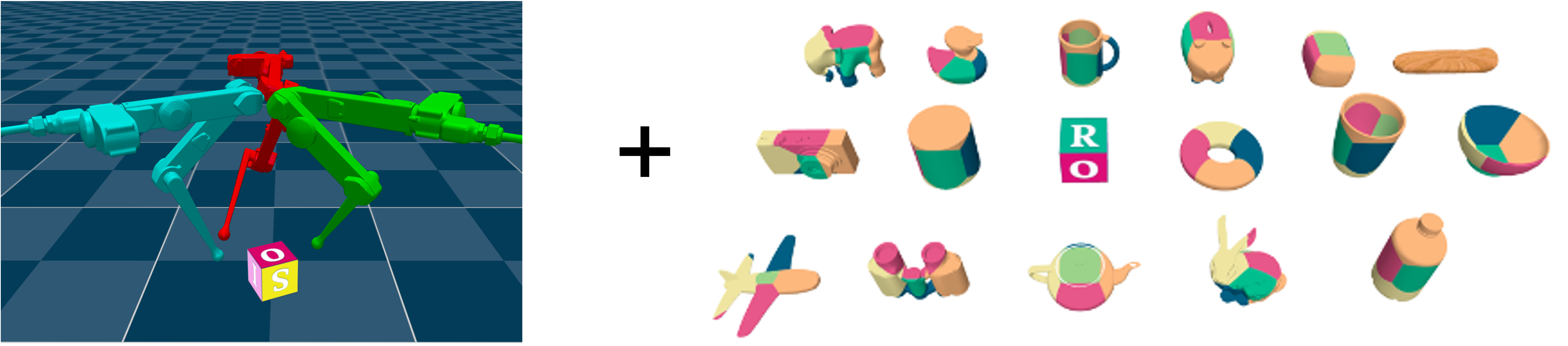
- State-of-the-art results: the proposed method consistently achieves state-of-the-art results in various challenging dexterous manipulation tasks, e.g. fingertip in-air manipulation, TriFinger in-hand manipulation, and Allegro hand on-palm reorientation, all with diverse objects: 96.5% success rate across tasks, high manipulation accuracy: reorientation error of 11° and position error of 7.8 mm, and model predictive control running above 70Hz for all tasks.

- contact: customized collision detection wrapper (based on MuJoCo APIs).
- envs: all testing environments are here.
- examples:
- models :
explicit_model.py: the implementation of the proposed complementarity-free multi-contact model.qp_model.py: the implementation of optimization-based multi-contact model.
- planning: model predictive control (MPC) class.
mpc_explicit.py: implementing complementarity-free contact-implicit MPC planner (proposed in Algorithm 1 in paper).mpc_implicit.py: implementing complementarity-based MPC planner (comparison method).
- utils: utilities functions, such as rotation transformation, metric valuations.
The codes have run smoothly with Python 3.11 on the Author's MacBook with Apple M2 Pro chip.
Before run examples, you may want to add the project directory to your PYTHONPATH.
export PYTHONPATH=/path/to/this/repo:$PYTHONPATH
Instruction: Use the following command template to run all examples of Fingertip manipulation in the paper. Copy the command template in the 2nd column and replace **** with one in the 3rd column to run.
The command template shown is for MacOS users. For Linux users, start with python instead of mjpython
For example, the following command on MacOS
mjpython examples/mpc/fingertips/cube/test-air.pyruns the example of fintertips 3D in-air manipulation with cube.
| object | Command template (Linux: start with python) |
replace **** with |
|---|---|---|
| cube | mjpython examples/mpc/fingertips/cube/test-**** |
- air.py: in-air manipulation - ground-flip.py: on-ground flipping manipulation - ground-rotation.py: on-ground rotation manipulation |
| Stanford bunny | mjpython examples/mpc/fingertips/bunny/test-**** |
- air.py: in-air manipulation - ground-rotation.py: on-ground rotation manipulation |
| foambrick | mjpython examples/mpc/fingertips/foambrick/test-**** |
- air.py: in-air manipulation - ground-flip.py: on-ground flipping manipulation - ground-rotation.py: on-ground rotation manipulation |
| stick | mjpython examples/mpc/fingertips/stick/test-**** |
- ground-flip.py: on-ground flipping manipulation |
Instruction: Use the following command template to run all examples of TriFinger in-hand manipulation in the paper. Copy the command template in the 2nd column and replace **** with one in the 3rd column to run.
The command template shown is for MacOS users. For Linux users, start with python instead of mjpython
For example: the following command on MacOS
mjpython examples/mpc/trifinger/bunny/test.pyruns the example of TriFinger in-hand manipulation with Standford bunny object.
| Command template for TriFinger in-hand manipulation examples | replace **** with any of the following object names |
|---|---|
mjpython examples/mpc/trifinger/****/test.py |
- airplane - binoculars - bowl - bunny - camera - can - cube - cup - elephant - foambrick - mug - piggy_bank - rubber_duck - stick - teapot - torus - water_bottle |

Instruction: Use the following command template to run all examples of Allegro hand on-palm reorientation in the paper. Copy the command template in the 2nd column and replace **** with one in the 3rd column to run.
The command template shown is for MacOS users. For Linux users, start with python instead of mjpython
For example: the following command on MacOS
mjpython examples/mpc/trifinger/bunny/test.pyruns the example of Allegro hand on-palm reorientation with Standford bunny object.
| Command template for Allegro hand on-palm reorientation examples | replace **** with any of the following object names |
|---|---|
mjpython examples/mpc/allegro/****/test.py |
- airplane - binoculars - bowl - bunny - camera - can - cube - cup - elephant - foambrick - mug - piggy_bank - rubber_duck - stick - teapot - torus - water_bottle |
If any part of the project is helpful to your work, please consider citing our work.
@article{jin2024complementarity,
title={Complementarity-Free Multi-Contact Modeling and Optimization for Dexterous Manipulation},
author={Jin, Wanxin},
journal={arXiv preprint arXiv:2408.07855},
year={2024}
}