This repository contains modified code of LVI-SAM for easier using.

You can use the following commands to download and compile the package.
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/Cc19245/LVI-SAM-Easyused
cd ..
catkin_makeNote:If you want to use the no-modified code (origin LVI-SAM official code), you can change the defination in CMakeLists.txt and compile again.
################## 编译开关 compile switch##############
# -DIF_OFFICIAL=1: use origin official LVI-SAM code
# -DIF_OFFICIAL=0: use modified code of this repo
add_definitions(-DIF_OFFICIAL=0)params_camera.yaml: set the VIO params, especially for T_imu_camera. It's same as VINS-Mono.
###################### extrinsic between IMU and Camera ###########################
###################### T_IMU_Camera, Camera -> IMU ###########################
# R_imu_camera
extrinsicRotation: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 0, 0, -1,
-1, 0, 0,
0, 1, 0]
# t_imu_camera
extrinsicTranslation: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [0.006422381632411965, 0.019939800449065116, 0.03364235163589248]params_lidar.yaml: set the LIO params, especially for T_imu_lidar.
###################### extrinsic between IMU and LiDAR ###########################
###################### T_IMU_LiDAR, LiDAR -> IMU ############################
# t_imu_lidar
extrinsicTranslation: [0.0, 0.0, 0.0]
# R_imu_lidar
extrinsicRotation: [-1, 0, 0,
0, 1, 0,
0, 0, -1]Due to the special IMU (the Euler angle coordinate system is different from the angular velocity and angular velocity coordinate system) of official dataset , you also need to set which axis the IMU rotates around counterclockwise to get a positive output. For official sensor equipment, it is set as follows.
## 对绝大多数IMU来说,下面三个值分别是"+z", "+y", "+x" (for most of IMUs, the following config is "+z", "+y", "+x")
# 绕着哪个轴逆时针转动,输出yaw角度为正(which axis the IMU rotates around counterclockwise to get a positive yaw angle)
yawAxis: "-z"
# 绕着哪个轴逆时针转动,输出pitch角度为正(which axis the IMU rotates counterclockwise to get a positive pitch angle)
pitchAxis: "+x"
# 绕着哪个轴逆时针转动,输出roll角度为正(which axis the IMU rotates around counterclockwise to get a positive roll angle)
rollAxis: "+y"

## 对绝大多数IMU来说,下面三个值分别是"+z", "+y", "+x" (for most of IMUs, the following config is "+z", "+y", "+x")
# 绕着哪个轴逆时针转动,输出yaw角度为正(which axis the IMU rotates around counterclockwise to get a positive yaw angle)
yawAxis: "+z"
# 绕着哪个轴逆时针转动,输出pitch角度为正(which axis the IMU rotates counterclockwise to get a positive pitch angle)
pitchAxis: "+y"
# 绕着哪个轴逆时针转动,输出roll角度为正(which axis the IMU rotates around counterclockwise to get a positive roll angle)
rollAxis: "+x"

-
-
Run the launch file:
roslaunch lvi_sam run.launchNote: If you want to test the origin official LVI-SAM code (e.g. set
add_definitions(-DIF_OFFICIAL=1)in CMakeLists.txt to compile), you should run launch file as following.roslaunch lvi_sam run_official.launch -
Play existing bag files, e.g. handheld.bag:
rosbag play handheld.bag -
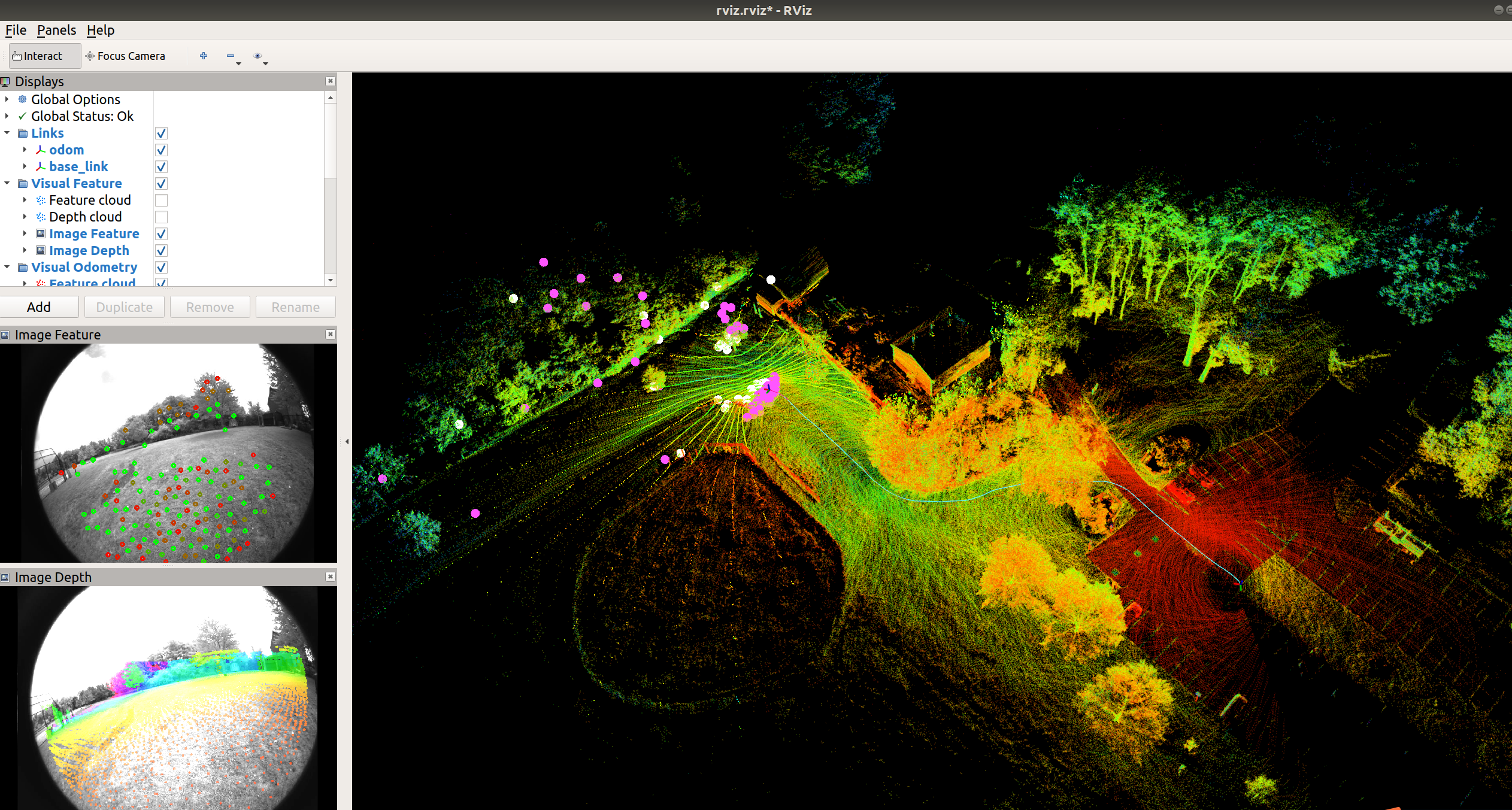
Results of origin official code (up fig) and our's modified code (down fig) on handheld.bag:

-
-
-
Run the launch file:
roslaunch lvi_sam M2DGR.launch -
Play existing bag files, e.g. gate_01.bag:
rosbag play gate_01.bag -
Results of our's modified code on gate_01.bag:
-
-
-
Run the launch file:
roslaunch lvi_sam UrbanNavDataset.launch -
Play existing bag files, the params we provided is for UrbanNav-HK-Data20200314. If you use other bag files of UrbanNavDataset, please check if the params need to be changed.
rosbag play 2020-03-14-16-45-35.bag -
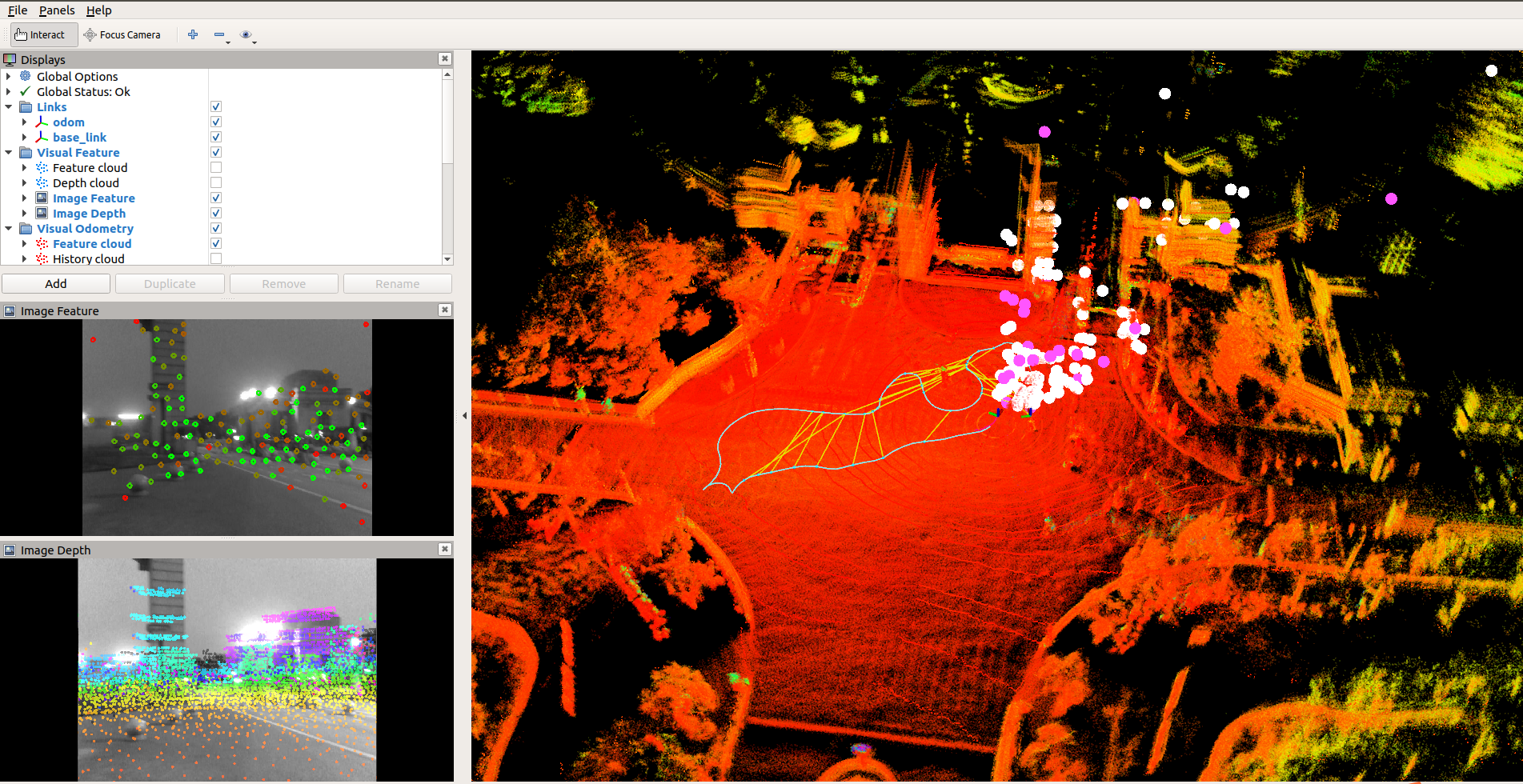
Results on UrbanNav-HK-Data20200314:

-
-
KITTI Dataset
-
Run the launch file:
roslaunch lvi_sam KITTI.launch -
Play existing bag files. If you want to use KITTI dataset, you need to get rosbag files firstly. You can get it refer to LIO-SAM/config/doc/kitti2bag. Here we use KITTI_2011_09_26_drive_0084_synced raw data to get rosbag file. The transformed rosbag file can get at this link.
rosbag play kitti_2011_09_26_drive_0084_synced.bag -
Results of our's modified code on kitti_2011_09_26_drive_0084_synced.bag:
-
-
-
Run the launch file:
roslaunch lvi_sam backbag.launch -
Play existing bag files, e.g. backbag.bag:
rosbag play backbag.bag -
Results of our's modified code on backbag.bag:

-
Results of our's modified code on our self 0117-1525.bag (Device is not same as backbag.bag, so it has another params. However, sorry for privacy issues, this data package can not open source):
roslaunch lvi_sam ljj.launch rosbag play 0117-1525.bag
-







- More test on different dataset, e.g. KAIST. However, these datasets' lidar data have no ring information. So LVI-SAM can't run directly. If you want to run on these datasets, you need to modifidy the code to add this information refer to LeGO-LOAM.
If you want to know what changes I made and why they make sense, you can refer to my blog: LVI-SAM坐标系外参分析与代码修改,以适配各种数据集.
- Origin official LVI-SAM.