This repository has been tested with Gazebo-11 (Noetic) and IsaacSim 2023.1.1.
Compatibility with other versions is not guaranteed.
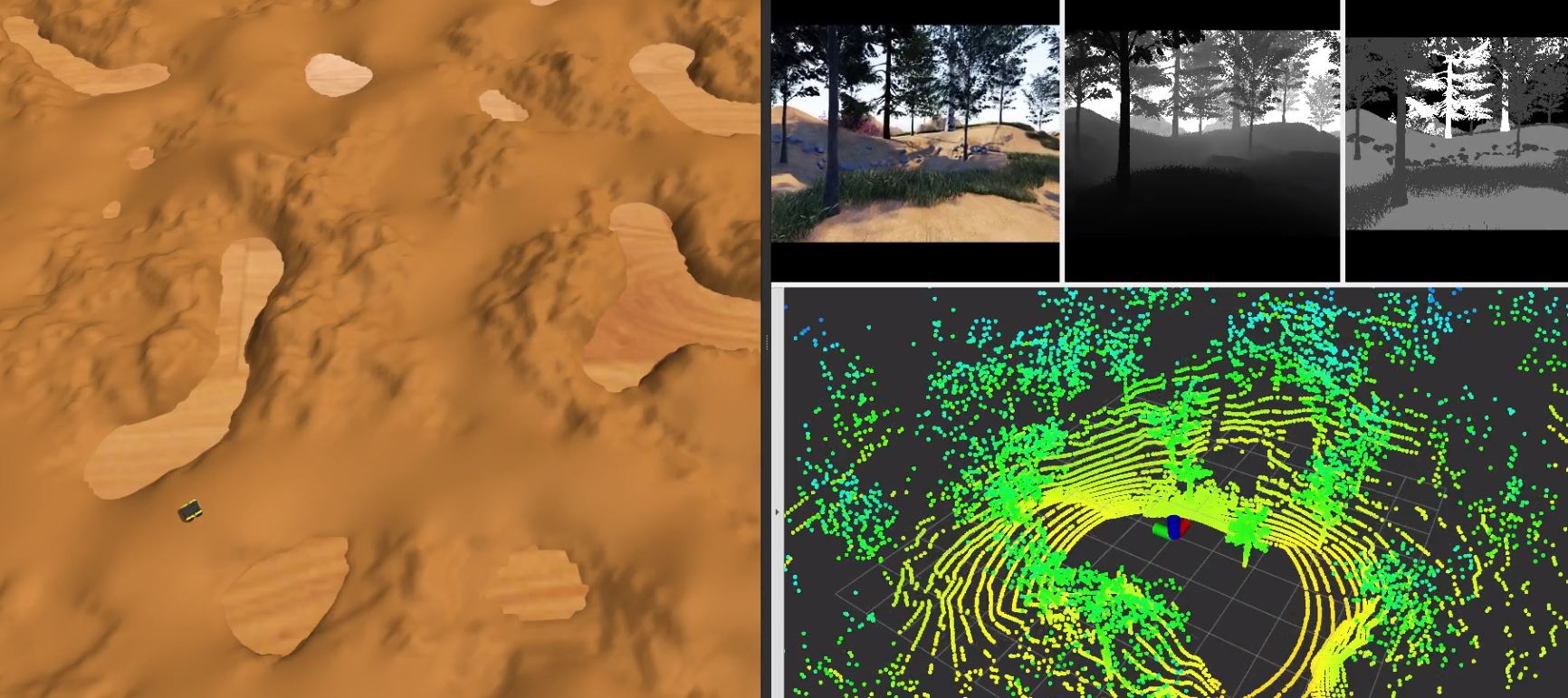 🎥 Click image to watch the video
🎥 Click image to watch the video
Gazebo Terrain
|
IsaacSim World
|
cd {your_workspace}/src
git clone [email protected]:dklee98/Gazesim.git
cd {your_workspace} && catkin build
source devel/setup.bash
cd {your_workspace}/src/Gazesim
bash ./download.sh
bash ./setup_gazebo.sh- Open Omniverse Launcher.
- Go to the Nucleus tab.
- Click the menu icon.
- Select Settings.
- On the settings page, click Restart All Services.
- Go to the Library tab in the launcher.
- Launch and start Isaac Sim.
- Wait until Isaac Sim is fully opened.
-
Move the model
Movegazesim_models/forest/forest_isaacsimdirectory to your Omniverse projects. -
Open the model
Openforest_isaacsim/forest_isaacsim.usdain IsaacSim. -
Add a second viewport
- Go to Window → Viewport → Viewport2.

- Go to Window → Viewport → Viewport2.
-
Change the camera in Viewport2
- Set the camera to
Camera_leftorCamera_right. - You can choose any viewpoint from Viewport1.
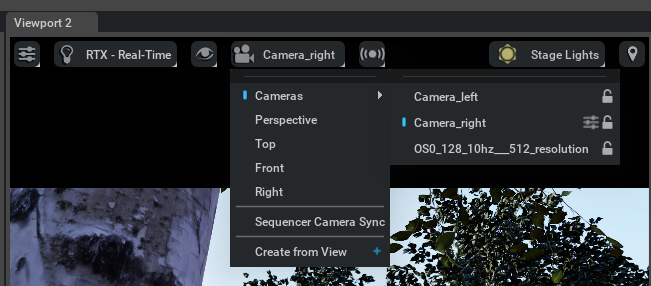
- Set the camera to
-
Proceed to the next step
⚠️ Important: Do NOT press the Start button yet!⚠️


-
Start ROS Core
roscore
-
Launch the Gazebo Simulator
roslaunch gazesim_ros simulator.launch
-
Launch the Gazesim Plugin
roslaunch gazesim_ros plugin.launch


For any inquiries, contact:
📩 [email protected]