![]()

We live in very exciting times 😃! BLDC motors are entering the hobby community more and more and many great projects have already emerged leveraging their far superior dynamics and power capabilities. BLDC motors have numerous advantages over regular DC motors but they have one big disadvantage, the complexity of control. Even though it has become relatively easy to design and manufacture PCBs and create our own hardware solutions for driving BLDC motors the proper low-cost solutions are yet to come. One of the reasons for this is the apparent complexity of writing the BLDC driving algorithms, Field oriented control (FOC) being an example of one of the most efficient ones.
The solutions that can be found on-line are almost exclusively very specific for certain hardware configuration and the microcontroller architecture used.
Additionally, most of the efforts at this moment are still channeled towards the high-power applications of the BLDC motors and proper low-cost and low-power FOC supporting boards are very hard to find today and even may not exist.
Therefore this is an attempt to:
- 🎯 Demystify FOC algorithm and make a robust but simple Arduino library: Arduino SimpleFOClibrary
- Support as many motor + sensor + driver + mcu combinations out there
- 🎯 Develop a modular FOC supporting BLDC driver boards:
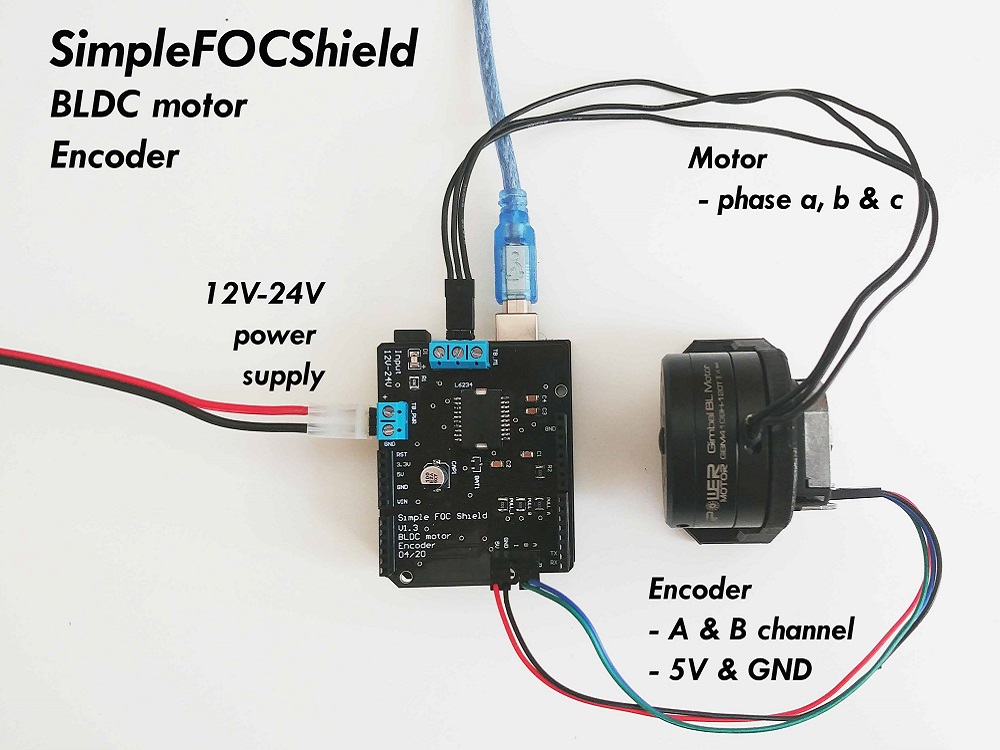
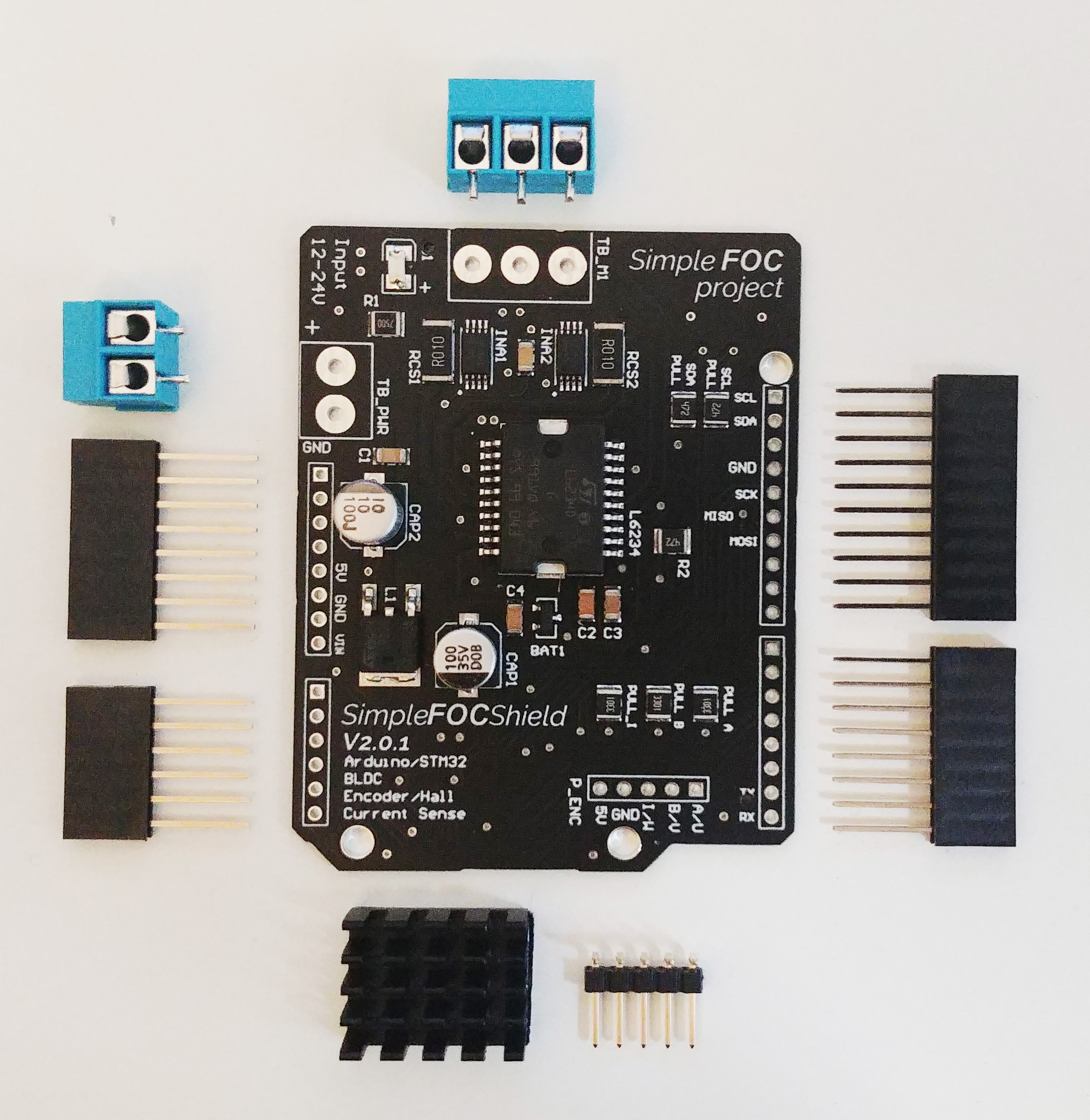
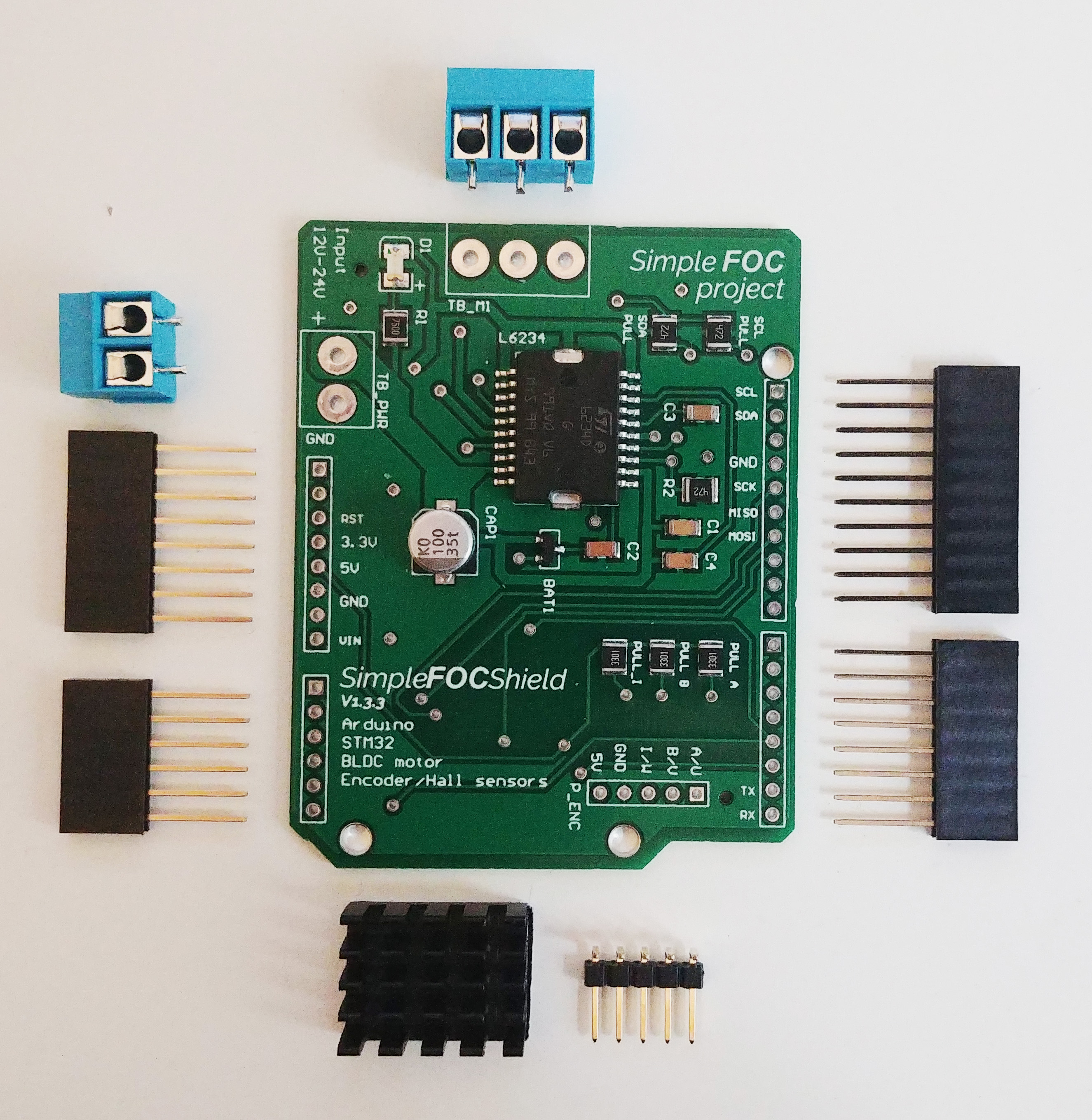
- Low-power gimbal driver (<5Amps) : Arduino SimpleFOCShield.
- NEW 📢: Medium-power BLDC driver (<30Amps): Arduino SimpleFOCPowerShield .
- See also @byDagor's fully-integrated ESP32 based board: Dagor Brushless Controller
NEW RELEASE 📢: SimpleFOClibrary v2.2.1 see release
- Sensor class init bugfix #121
- Voltage/current limit handling bugs #118
- Added the new motion control interface to the commander see docs
- New target setting - possible to set the position, velocity and torque target at once
- Separated the motion control interface from full motor callback - only motion control and torque control type, enable disable and target setting
- New MCU support see docs
- Generic sensor class - to implement a new sensor only implement one function see docs

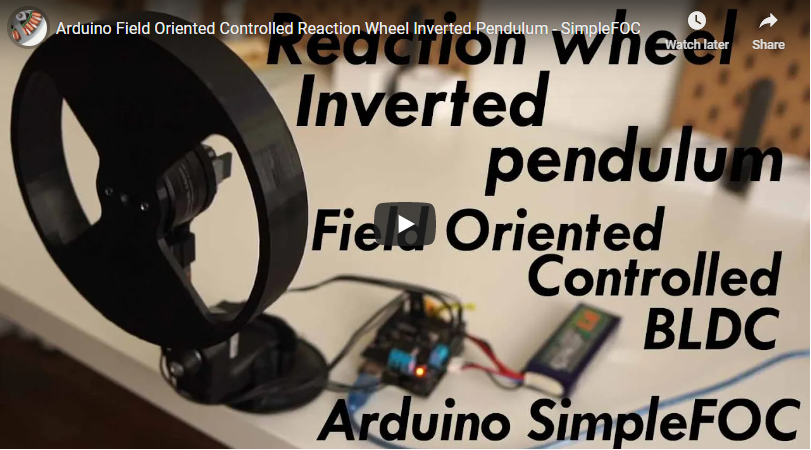
This video demonstrates the SimpleFOClibrary basic usage, electronic connections and shows its capabilities.
- Arduino compatible:
- Arduino library code
- Arduino Library Manager integration
- Open-Source: Full code and documentation available on github
- Easy to setup and configure:
- Easy hardware configuration
- Easy tuning the control loops
- Modular:
- Supports as many sensors, BLDC motors and driver boards as possible
- Supports multiple MCU architectures:
- Plug & play: Arduino SimpleFOCShield
- Plug & play: In combination with Arduino SimpleFOClibrary - github
- Low-cost: Price of €15 - Check the pricing
- In-line current sensing: Up to 3Amps/5Amps bidirectional
- configurable: 3.3Amps - 3.3V adc, 5Amps - 5V adc
- Integrated 8V regulator:
- Enable/disable by soldering pads
- Max power 120W - max current 5A, power-supply 12-24V
- Designed for Gimbal motors with the internal resistance >10 Ωs.
- Stackable: running 2 motors in the same time
- Encoder/Hall sensors interface: Integrated 3.3kΩ pullups (configurable)
- I2C interface: Integrated 4.7kΩ pullups (configurable)
- Configurable pinout: Hardware configuration - soldering connections
- Arduino headers: Arduino UNO, Arduino MEGA, STM32 Nucleo boards...
- Open Source: Fully available fabrication files - how to make it yourself
Depending on if you want to use this library as the plug and play Arduino library or you want to get insight in the algorithm and make changes there are two ways to install this code.
The simplest way to get hold of the library is directly by using Arduino IDE and its integrated Library Manager.
- Open Arduino IDE and start Arduino Library Manager by clicking:
Tools > Manage Libraries.... - Search for
Simple FOClibrary and install the latest version. - Reopen Arduino IDE and you should have the library examples in
File > Examples > Simple FOC.
- Go to the github repository
- Click first on
Clone or Download > Download ZIP. - Unzip it and place it in
Arduino Librariesfolder. Windows:Documents > Arduino > libraries. - Reopen Arduino IDE and you should have the library examples in
File > Examples > Simple FOC.
- Open terminal and run
cd #Arduino libraries folder
git clone https://github.com/simplefoc/Arduino-FOC.git- Reopen Arduino IDE and you should have the library examples in
File > Examples > Simple FOC.
For those willing to experiment and to modify the code I suggest using the minimal project builder minimal branch.
This code is completely independent and you can run it as any other Arduino Sketch without the need for any libraries.
All you need to do is:
- Go to minimal branch
- Follow the tutorial in the README file and choose only the library files that are necessary for your application.
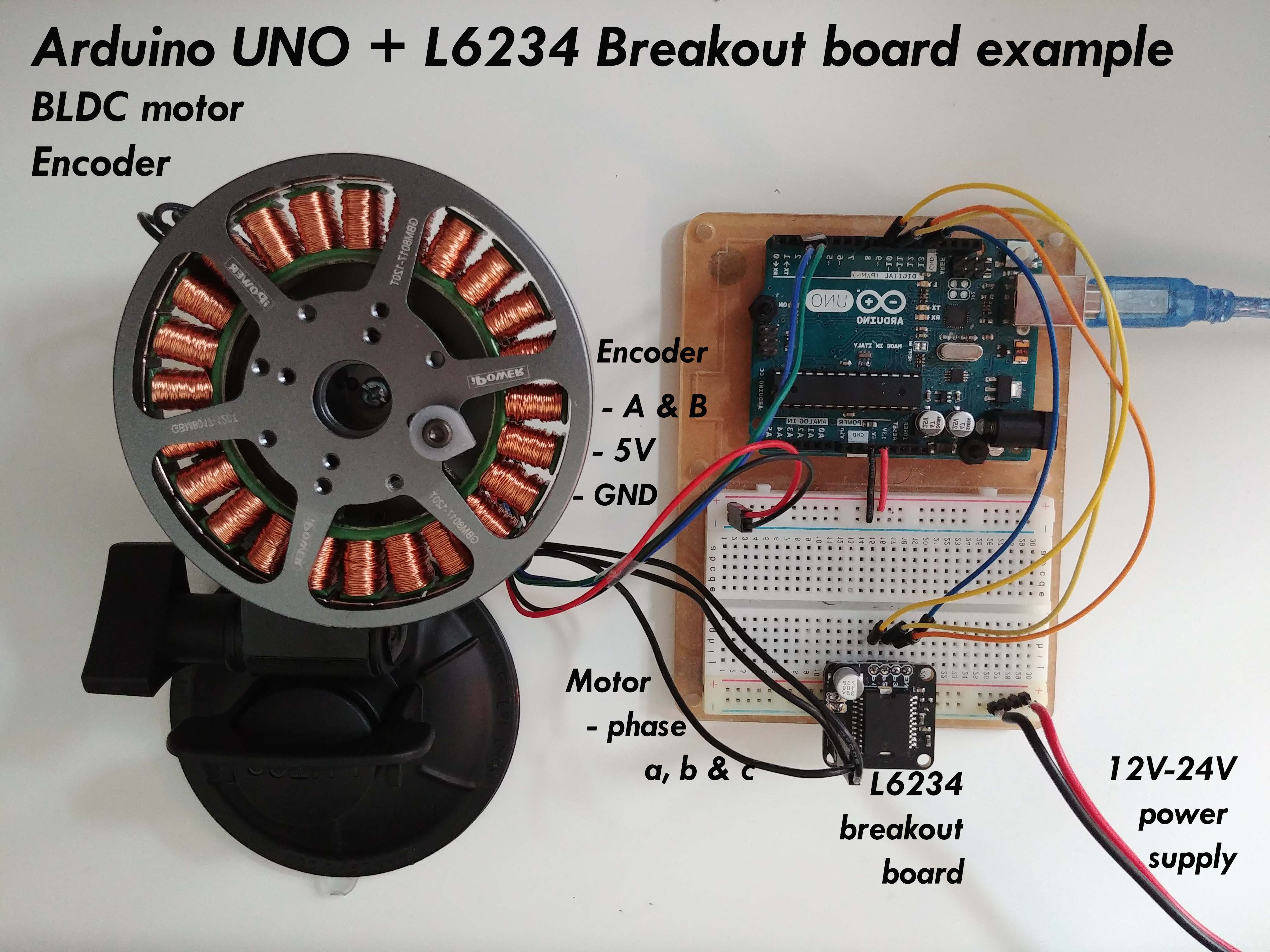
This is a simple Arduino code example implementing the velocity control program of a BLDC motor with encoder.
NOTE: This program uses all the default control parameters.
#include <SimpleFOC.h>
// BLDCMotor( pole_pairs )
BLDCMotor motor = BLDCMotor(11);
// BLDCDriver( pin_pwmA, pin_pwmB, pin_pwmC, enable (optional) )
BLDCDriver3PWM driver = BLDCDriver3PWM(9, 10, 11, 8);
// Encoder(pin_A, pin_B, CPR)
Encoder encoder = Encoder(2, 3, 2048);
// channel A and B callbacks
void doA(){encoder.handleA();}
void doB(){encoder.handleB();}
void setup() {
// initialize encoder hardware
encoder.init();
// hardware interrupt enable
encoder.enableInterrupts(doA, doB);
// link the motor to the sensor
motor.linkSensor(&encoder);
// power supply voltage [V]
driver.voltage_power_supply = 12;
// initialise driver hardware
driver.init();
// link driver
motor.linkDriver(&driver);
// set control loop type to be used
motor.controller = MotionControlType::velocity;
// initialize motor
motor.init();
// align encoder and start FOC
motor.initFOC();
}
void loop() {
// FOC algorithm function
motor.loopFOC();
// velocity control loop function
// setting the target velocity or 2rad/s
motor.move(2);
}You can find more details in the SimpleFOC documentation.
Here are some of the SimpleFOClibrary and SimpleFOCShield application examples.


Find out more information about the Arduino SimpleFOC project in docs website
| Branch | Description | Status |
|---|---|---|
| master | Stable and tested library version | |
| dev | Development library version | |
| minimal | Minimal Arduino example with integrated library |