

- Comprehensive and robust manipulation of objects
- Fast enough to support online computation and replanning
-
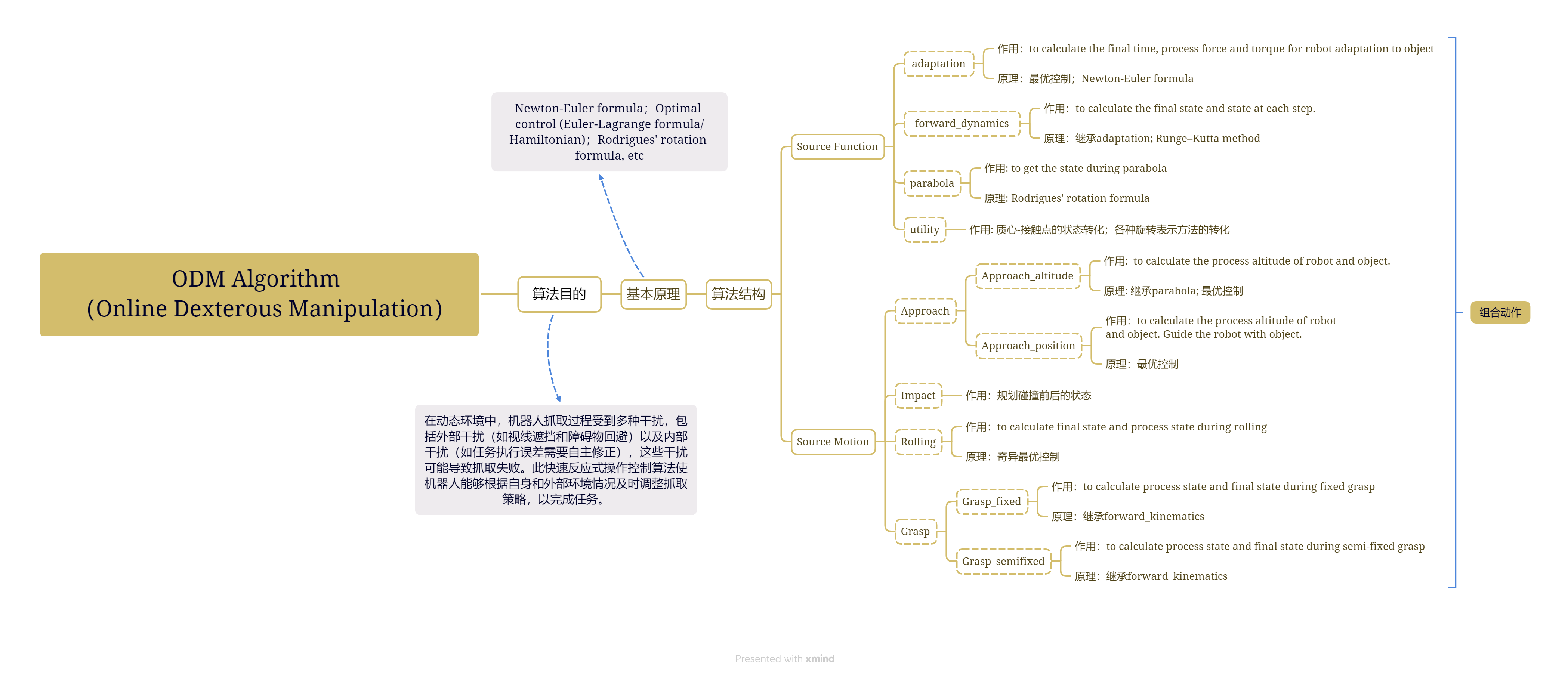
source_functionfolder is about the source code of the basic functions likeforward_dynamics.py -
source_motionfolder is about source motions which can be combined to form a task, includingapproach,impact,rolling,sticking,grasping -
combined_motionfolder is about specific task achieved by combining different source motions. -
datafolder is about the generated data of different motions.imagesfolder is to store the images used in this README.md file. -
Repo structure:
-
Demo of each source motion:
- approach stage: to make robot approach the object in both position and orientation (blue is the object, yellow is the robot)
- impact stage: to make robot impact the object
- rolling stage: to utilize robot to roll the object to a desired orientation
- sticking stage: to make object stick to the robot end effector and move to a desired position and orientation
- grasping stage: to make robot grasp the object, this demo is a fixed grasp, but the code can also support a moving grasp
- approach stage: to make robot approach the object in both position and orientation (blue is the object, yellow is the robot)





