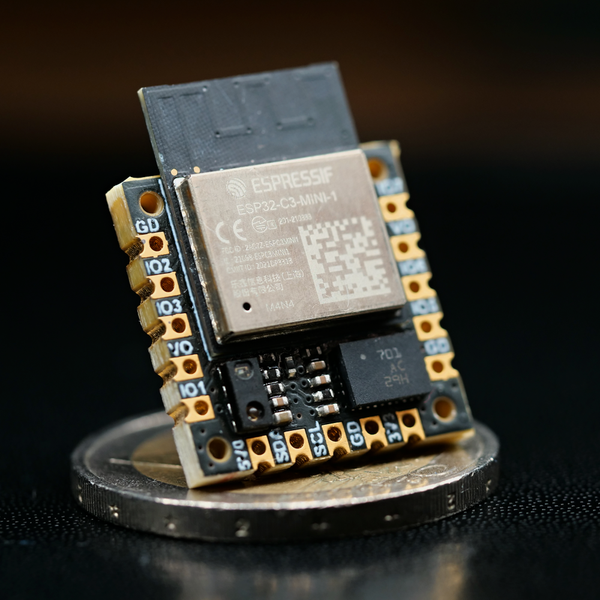
CodeCell is a penny-sized board that helps you miniaturize your DIY robots, wearables, and IoT projects with ease! Designed for all makers, it features an Arduino-friendly ESP32-C3 Wi-Fi & BLE module, programmable through a standard USB-C cable ~ which can also charge a LiPo battery that easily plugs into the onboard connector. That’s not all! We've created a CodeCell library to make it easier to interact with the onboard sensors ~ its Light Sensor can detect darkness and measure proximity up to 20 cm! While the optional Motion Sensor features a 9-axis sensor-fusion IMU to measure angular rotations, step counts, personal activity, tapping, gravity, acceleration, rate of rotation, magnetic fields, and more!
A full guide to get you started with CodeCell can be found here.
-
To initialize the CodeCell, use the
myCodeCell.Init()function with one or more of the predefined macros. Each macro corresponds to a specific sensing function. Here are the available macros:LIGHT// Enables Light SensingMOTION_ACCELEROMETER// Enables Accelerometer SensingMOTION_GYRO// Enables Gyroscope SensingMOTION_MAGNETOMETER// Enables Magnetometer SensingMOTION_LINEAR_ACC// Enables Linear Acceleration SensingMOTION_GRAVITY// Enables Gravity SensingMOTION_ROTATION// Enables Rotation SensingMOTION_ROTATION_NO_MAG// Enables Rotation Sensing without MagnetometerMOTION_STEP_COUNTER// Enables Walking Step CounterMOTION_STATE// Enables Motion State DetectionMOTION_TAP_DETECTOR// Enables Tap DetectorMOTION_ACTIVITY// Enables Motion Activity Recognition
-
Example Usage:
myCodeCell.Init(LIGHT);// Initializes Light SensingmyCodeCell.Init(LIGHT + MOTION_ROTATION);// Initializes Light Sensing and Angular Rotation SensingmyCodeCell.Init(LIGHT + MOTION_ROTATION + MOTION_STATE);// Initializes Light Sensing, Angular Rotation Sensing, and State Detection
Note: You can combine multiple macros using the + operator to initialize multiple sensors.
- Call the
myCodeCell.Run()function in theloop()to manage battery and power. This function returns true every 100ms and also handles the onboard LED to indicate power status. When the battery voltage falls below 3.3V, the LED will blink red 10 times and then go into Sleep Mode until the USB cable is connected for charging. While charging, the CodeCell will shut down the application, light the LED blue, and wait until the battery is fully charged. Once fully charged, it will start a breathing-light animation with a speed corresponding to the proximity distance. The LED will shine green when powered by the battery and blue when powered via USB.
-
After initializing the sensors, you can use the following functions to read data from them:
Sensor Read Functions:
Light_ProximityRead()// Reads the proximity value from the light sensorLight_WhiteRead()// Reads the white light intensity from the light sensorLight_AmbientRead()// Reads the ambient light intensity from the light sensorMotion_TapRead()// Reads the number of taps detected (tap = 1, no tap = 0)Motion_StateRead()// Reads the current state (On Table = 1, Stationary = 2, Stable = 3, Motion = 4)Motion_ActivityRead()// Reads the current activity (Driving = 1, Cycling = 2, Walking = 3/6, Still = 4, Tilting = 5, Running = 7, Climbing Stairs = 8)Motion_AccelerometerRead(float &x, float &y, float &z)// Reads acceleration data along the x, y, and z axesMotion_GyroRead(float &x, float &y, float &z)// Reads rotational velocity data along the x, y, and z axesMotion_MagnetometerRead(float &x, float &y, float &z)// Reads magnetic field strength data along the x, y, and z axesMotion_GravityRead(float &x, float &y, float &z)// Reads gravity vector data along the x, y, and z axesMotion_LinearAccRead(float &x, float &y, float &z)// Reads linear acceleration data along the x, y, and z axesMotion_StepCounterRead(uint16_t &x)// Reads the number of steps countedMotion_RotationRead(float &roll, float &pitch, float &yaw)// Reads angular rotational data (roll, pitch, yaw)Motion_RotationNoMagRead(float &roll, float &pitch, float &yaw)// Reads angular rotational data without magnetometer
-
Example Usage:
uint16_t proximity = myCodeCell.Light_ProximityRead();myCodeCell.Motion_AccelerometerRead(myX, myY, myZ);myCodeCell.Motion_RotationRead(myRoll, myPitch, myYaw);
Note: You can use myCodeCell.PrintSensors() to print the values of all enabled sensors on the Serial Monitor.
This 'CodeCell' library contains various features, including device intialization, power managment, light sensning and motion sensing. The VCNL4040 light sensor code does not rely on any external libraries. But some of the BNO085 Motion-sensor functions were adapted from the SparkFun BNO08x Arduino Library and the official library provided by CEVA for the SH2 sensor hub.
The SparkFun BNO08x library, originally written by Nathan Seidle and adjusted by Pete Lewis at SparkFun Electronics, is released under the MIT License. Significant modifications were made to adapt it and integrate into the 'CodeCell' library.
Additionally, this project incorporates the official CEVA SH2 sensor hub library files, which is licensed under the Apache License 2.0.
CEVA’s notice is as follows:
This software is licensed from CEVA, Inc.
Copyright (c) CEVA, Inc. and its licensors. All rights reserved.
CEVA and the CEVA logo are trademarks of CEVA, Inc.
For more information, visit CEVA's website.