Dynamic Object Removal is a ROS2 package that removes dynamic objects from a point cloud by using a cropping technique. This node subscribes to a point cloud topic and a detected objects topic, synchronizes the incoming messages, and then performs object removal based on the detected object's pose and dimensions. The resulting point cloud with removed objects is then published as output.
- ROS2 (Robot Operating System 2)
- PCL (Point Cloud Library)
- Eigen (C++ template library for linear algebra)
After installing autoware (please see source-installation page), execute the following commands:
cd ~/autoware/src/universe/external/
git clone https://github.com/davutcanakbas/dynamic_object_removal.git
cd ~/autoware/
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release --packages-up-to dynamic-object-removalRun the dynamic_object_removal node by executing:
ros2 launch lidar_centerpoint lidar_centerpoint.launch.xml
ros2 launch dynamic_object_removal dynamic_object_removal_default.launch.xml demo:=trueMake sure to have the required topics for point cloud and detected objects(lidar_centerpoint) available. The node will subscribe to these topics and perform dynamic object removal.
The node takes the following parameters:
- min_point (default offset: [-0.25, -0.25, -0.1, 1.0]): Minimum point for cropping box dimensions.
- max_point (default offset: [0.25, 0.25, 0.25, 1.0]): Maximum point for cropping box dimensions.
These parameters define the dimensions offset of the cropping box used to remove objects. You can modify these parameters.
- Subscribed Topics:
- /input/point_cloud: Input point cloud topic.
- /objects: Detected objects topic.
- Published Topics:
- output_pointcloud: Processed point cloud with removed objects.


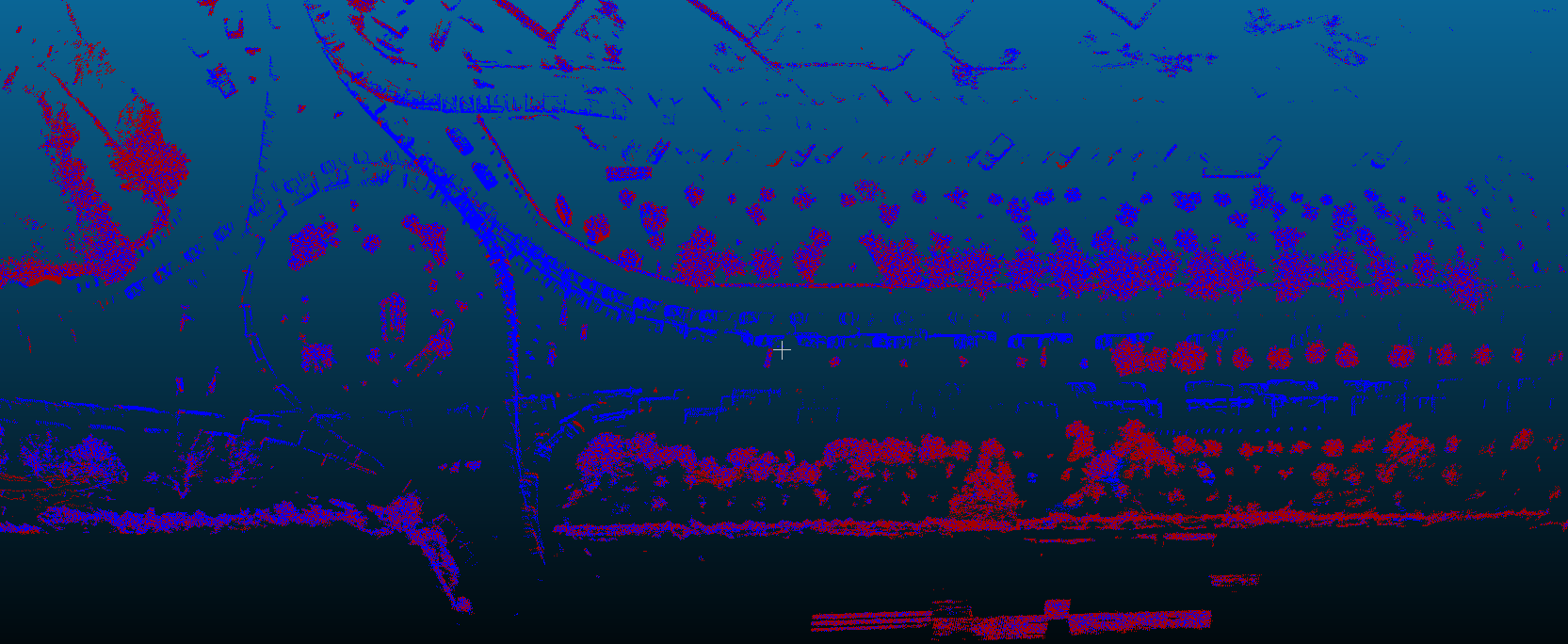
- Mapping example result in cloudcompare (offground), blue point mapping without DOR, red point mapping with DOR.