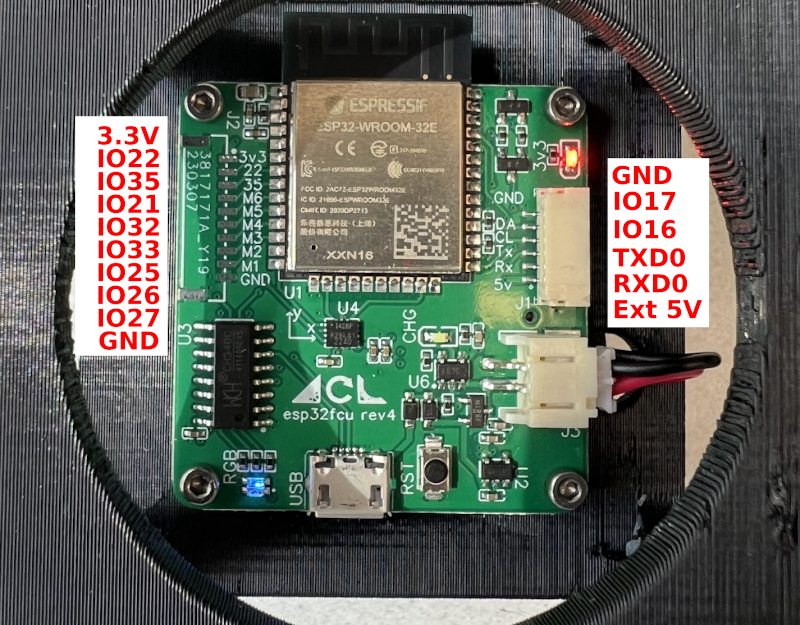
Supporting software to stream IMU (ICM-42688-p) connected to ESP32 via SPI onto desktop computer via serial or WiFi. Serial/UDP IO is handled in C++ and exposed to Python with pybind11.
This repo provides the esp32imu Python package to allow easy access to the hardware from Python. The Python package includes C++ serial and UDP drivers for quickly communicating with the esp32. The C++ is hidden from the user via pybind11.
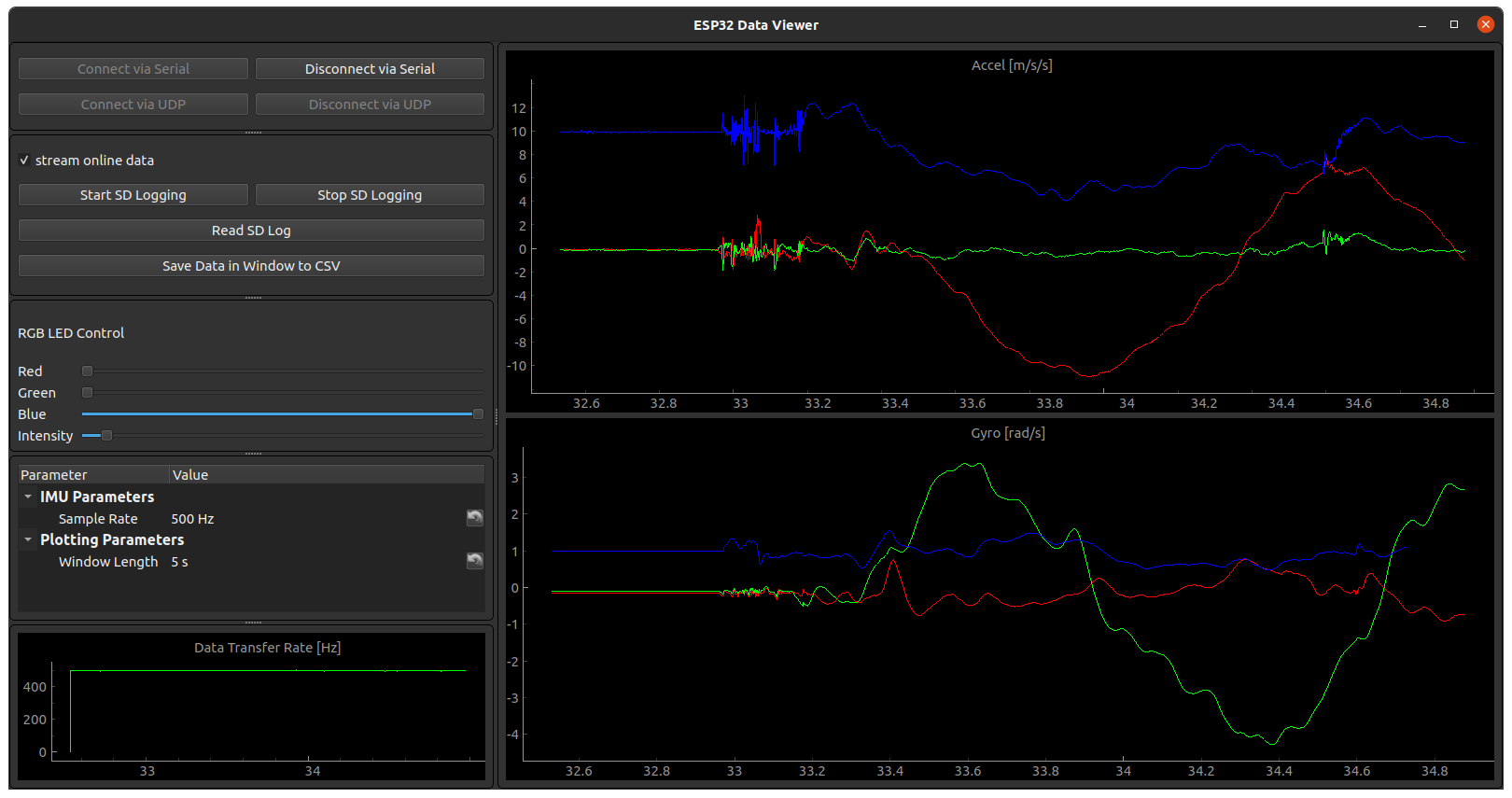
Once esp32imu is installed on your machine, you will be able to quickly plot data (see Examples below) like:
Linux / MacOS
After cloning this project onto your computer:
- Build C++ driver with Python bindings (requires Boost):
mkdir build
cd build
cmake ..
makeOnce the package builds successfully, you can install the esp32imu Python package as described below.
Windows
Compilation of this package has been tested on a Windows 10 machine. The environment was setup as follows. Explicit versions used are listed, but these steps are expected to work with reasonably recent versions of these tools.
- Install git bash (2.30.1)
- Install CMake (3.19.5)
- Install Python (3.9.1)
- Install Visual Studio Community or Professional (Pro 2019, v16.8.5 with MSVC 14.28.29333)
- Install Boost (1.75.0,
boost_1_75_0-msvc-14.2-64.exe)
Once the development environment is setup, use git bash (or cmd) to run the following commands
$ git clone https://github.com/plusk01/esp32imu # clone this repo in your preferred directory
$ cd esp32imu
$ mkdir build
$ cd build
$ cmake -DBUILD_SHARED_LIBS=OFF ..
$ cmake --build . --target ALL_BUILD --config Release # or open in VS: start esp32imu.sln
$ cmake --build . --target pypkg --config Release # to tar python pkgOnce the package builds successfully, you can install the esp32imu Python package as described below.
Installing Python Package from Source
Install the built-from-source Python package with pip:
cd build
make pip-installNote: On windows, if the make pip-install command doesn't work, you will need to manually install the python package with
cd build/bindings/python
python -m pip install .Check that esp32imu is properly installed by opening a new terminal and running python -m pip list and looking for the esp32imu package. Further, run python and import esp32imu and dir(esp32imu) - you should see a list of esp32imu attributes, including SerialDriver.
Flash ESP32 with firmware_serial/firmware_serial.ino sketch for serial comm and firmware_udp/firmware_udp.ino for WiFi/UDP.
See an IMU data plot in real-time with the examples/main.py file.
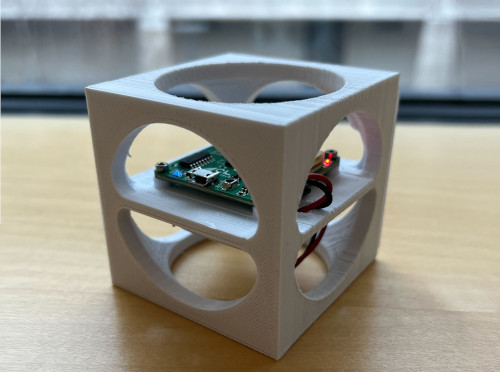
You can use the esp32imu package for attitude estimation demos. To enable assessing algorithm accuracy, a cube can be built so that true pitch and roll angles can always be identified.

To create new or change existing messages, changes need to be made in esp32imu.h and in serial_driver.cpp. For these changes to appear in Python, py_teensyimu.cpp also needs to be changed. For an example of necessary changes, see this commit where two new messages (IMU_NoMag and IMU_3DOF) were added.
If messages are changed, this project must be built from source.