{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
P.I.D & I3D
DRONE QUADRIMOTEUR EN X.
Drone Frame impression 3D
-Quel type de plastique utiliser ?
Personnellement j'ai utilisé du PETG mais cela est une solution non optimale. Le polypropylène plus difficile à imprimer, ne colle pas aux surfaces de type build-plate ou verre. Le polypropylène ne colle que sur sur le polypropylène. Son désavantage est sa résistance mécanique plus faible à l'étirement que la plupart des plastiques. Il possède néanmoins une grande résistance au choc et une bonne flexibilité. Pour notre projet la résistance au choc est essentielle.
Paramètres impression 3D
-Surface d'impression minimale pour ce drone 180*180 mm. -Température impression buse PETG : 245 C° -Température impression plateau PETG : 80 C° -Buse 0.6 mm -Hauteur de couche 0.2 mm Remarque: les températures d'impression varie en fonction de la marque de plastique utilisée.
Fichier impression 3D
-Drone.montage.stl ce fichier n'est pas à imprimé, il montre juste l'assemblage des différentes piéces. -N.basdrone.stl ce fichier contient la pièce du bas du drone avec le support de batterie (lorsque vous imprimerez cette pièce activer les supports). -N.ruche.stl ce fichier contient la pièce du haut qui permet de fixer les bras du drone.Il faut que les losanges soient perpendiculaires au losange de la pièce du bas pour avoir une rigidité égale. -N.bras.stl ce fichier permet d'imprimer les bras du drone, dupliquez les au nombres de 4 dans votre slicer (Cura...). -N.calibras.stl ce fichier permet d'imprimer des pièces alignées au milieu sur la longueur et la largeur du drone. Elle permettra de glisser un rond de 6mm de diamètre pour pouvoir calibrer les coefficients P.I.D des axes PITCH et ROLL. -N.supMPU6050.stl ce fichier contient l'impression du support gyroscope, imprimez deux support.
Matériel
-MPU6050 *2 ~5€ -ESC 30A *4 ~20€ -arduino Uno ou arduino Mega -Radiocommande Flysky fs-i6 avec récepteur ~45€ -Moteur brushless BR2212 1000KV *4 ~20€ -Batterie 3S 11.1v ~30€ -Hélices horaires * 2 -Hélices anti-horaires
Microcontrôleur
L'Arduino est un circuit électronique composé d'un microcontrôleur que l'on peut appeler micro-ordinateur il possède de la mémoire morte reprogrammable (EPROM), de la mémoire vive et un processeur qui fait les calculs,il est doté d'entrée est de sortie, alors il peut communiquer de l'information sous forme électrique(OUTPUT)est recevoir de l'information(INPUT). Il ya la partie alimentation composée d'un ou de plusieurs régulateur qui va limiter la tension a 5v est 3.3v avec des Condensateur est des résistances qui permettent de stabiliser la tension, un MiCro a besoin d'une alimentation très stable pour fonctionner correctement. il y a aussi l'oscillateur qui permet au MiCro de se repérer dans le temps est déterminé aussi sa rapidité d’exécution en HZ. Puis la dernière partie qui est un convertisseur USB::UART qui vous permet de téléverser le programme dans le MiCro, mais pas que, il permet aussi de recevoir des données pour voir si notre Prog est fonctionnel. Résumons l'arduino est un MiCro "Plug&Play" qui va nous permettre de recevoir des donnés les transformer avec des calculs puis transmettre des données a des composants electronique. Le gyroscope & accéléromètre -Le MPU6050 est une centrale inertielle qui réuni gyroscope et accéléromètre ce qui permet au microcontrôleur de connaître la position du drone autour de trois axe X = ROLL, Y = PITCH, Z = YAW en degrés et la vitesse a laquelle il se déplace en degrés/S. Vous verrez plus tard qu'il est paramétrable cela nous permettra de déterminer une certaines plage de mesure ou activer des filtres. Il communiquera avec l'arduino via le protocole de communication nommé "I2C".
ESC
-Les ESC sont des circuit électronique composer d'un MiCro avec un programme qui contrôle des transistor Mosfet qui on le rôle d'interrupteur pour pouvoir commuter le courant électrique est changer le sens du champ magnétique des bobines(situées sur le stator) en fonction de la position du rotor constitué d'aimants, cette position est donnée au MiCro via des capteurs a effet Hall ou dans notre situation la force contre électromotrice. Le MiCro peut alors suivre la séquence propre au moteur et le faire tourner, pour contrôler la vitesse de rotation le MiCro utilise le rapport cyclique(PWM) en contrôlant les interrupteurs (Mosfet), pour vous donner un exemple imaginez une led avec un interrupteur que nous allumons 500ms puis éteignons 500ms et ainsi de suite nous avons alors un signal cyclique puis qu'il se répète, on peut aussi déterminer notre période qui est de 1s imaginons maintenant que notre led consomme 1 w/h = 3600 joule soit une consommation en énergie de 1 joule par seconde vu qu'une heure est égale a 3600s donc si notre led est allumée en permanence elle consomme 1 joule/S mais nous ne l'allumons que 50 % du temps donc la led recoit 50% de l'énergie quelle pourrait recevoir par apport au temps exemple sur 1h la led a consommée 1800J a la place de 3600J mais si vous faite cette expérience avec une période aussi longue 1s vous verrez la led clignoter et ce n'est pas le but recherché. L'objectif est de pouvoir moduler la luminosité de la led, pour cela il faut réduire la période pour que l'allumage et l'extinction passe sous le seuil de perception visuelle(~100ms) exemple 10ms allumé 10Ums éteint plus la période diminue plus la fréquence est élever et cela nécessite d'avoir des interrupteur qui peuvent commuter rapidement. Le calcul est le suivant (Rapport cyclique en % = durée allumé / durée période). Maintenant revenons a nos ESC plus la frequence "PWM" est élever plus la régulation de vitesse sera précise est constante, mais il faut alors un ESC avec des transistor de bonne qualité et capable de fonctionner a haute frequence pour notre premier drone se préoccuper de la frequence d'échantillonage n'a pas vraiment d’intérêt puisque nous utilisons des ESC bas de gamme. Malgré ses explication nous ne savons toujour pas comment envoyer de l'information au MiCro des ESC pour qu'il puisse réguler la vitesse mais vous allez voir que ce n'est pas très difficile, c'est notre controleur de vol qui envoie l'information au ESC, nous allons envoyer l'information en controlant la largeur d'impulsion pour étre plus clair c'est le temps que le signaux réste a l'état haut(5v) a ce niveau la frequence n'est pas trés importante pour notre cas. En général la longueur d'impulsion varie entre 1000us ce qui signifie moteur a l'arrét est 2000us qui correspond au moteur a pleine puissancece ce qui fait "théoriquement" 1000 vitesse différente possible.
- Moteur brushless
-Ce sont des moteur électrique sans balais est collecteur car ses moteur peuvent avoir une vitesse de rotation trés élever ce qui augmente la durée de vie du moteur mais il faut en contrepartie un circuit electronique pour assurer le role des balais est collecteur, l'orsque vous acheté des moteurs de drone vous verrez des inscriptions il ya d'abord les dimensions du moteur puis une indication sur la vitesse de rotation en fonction du voltage, je vais vous donner un exemple "BR2212 1000KV" vous voyez le nombre 2212, composé de quatre chifre ?. Les deux premier chiffre "22" indique le diamétre du stator et les deux suivant représente la hauteur du stator "12". Les KV vous donnent la vitesse du moteur en fonction du voltage que vous lui donné, nous avons la un moteur "1000KV" si je lui donne 2V le moteur tournera alors a 2000 tour/minutes. Nous allons maintenant parler du fonctionnement d'un moteur brushless tout d'abord il existe deux variantes le Brushless in-runner ou le stator est en périphérie est le rotor est central et le out-runner avec le stator central est le rotor appelé "cloche" a l'exterieur cela permet d'avoir un couple plus important, plus le diamétre de la cloche est important plus vous aurez de couple ces moteur sont les plus utiliser dans le monde du drone je n'ai jamais vue un moteur in-runner sur un drone.
Le rotor se compose d'aimant permanent avec un champ magnétique fixe, le stator est composer de bobines en changant le sens du courant on inverse les poles du champ magnétique rappeller vous que le NORD attire le SUD le SUD repousse le SUD est le NORD repousse le NORD, ses la que vient la notion de séquence pour faire tourner votre moteur il va falloir alimenter les bobines en inversant le sens du courant au bon moment afin que les champs magnétiques des bobines pousse et attire dans le sens voulu les aimants permanent pour crée une rotation. Une sequence se divise en plusieurs étapes qui se répéte, pour pouvoir connaitre la position du rotor est exécuter la bonne étapes on mesure le voltage de la bobine qui n'est pas alimenté, no moteur ont trois phase donc le nombre de bobines est un multiple de trois, imaginé un moteur avec trois bobines avec un point commun a chaque étapes on alimente deux bobines sur trois est on mesure le voltage de la bobine libre cette tension varie en fonction de la position de l'aimant permanent du rotor parapport a la bobine quand l'aimant est a 180° donc alignée avec la bobine la tension est nule ses ce que l'on appelle le "ZERO CROSS" qui permet au controleur de vitesse de savoir quand passer a l'étape suivante.
- Radiocommande & recepteur
-La radiocommande vous permez de déplacer le drone autour des trois axes ROLL,PITCH,YAW est de controler les GAZ. Le récepteur qui se trouve sur le dronne recoit les signaux de la télécommande et les transmets au controleur de vol. Le recepteur communique avec le controleur de vol via des channels et nous allons en utiliser quatre car nous avons quatre commande différente ROLL,PITCH,YAW et GAZ, la méthode de communication entre le récepteur est notre controleur de vol est la méme que celle utilisée pour controler les ESC,le recepteur enverra l'information en faisant varier la largeur d'impulsion en fonction de notre commande entre 1000us et 2000us pour lires la largeur d'impulsion soit le temps ou l'impulsion reste a l'etat haut nous allons utiliser les interruptions de l'arduino qui s'active a chaque changement d'état.
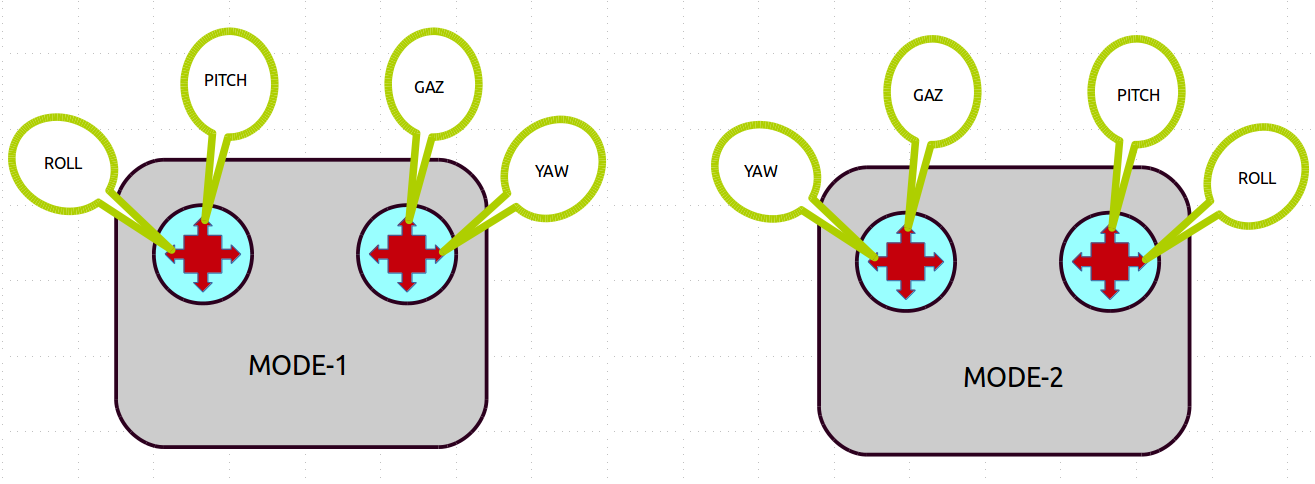
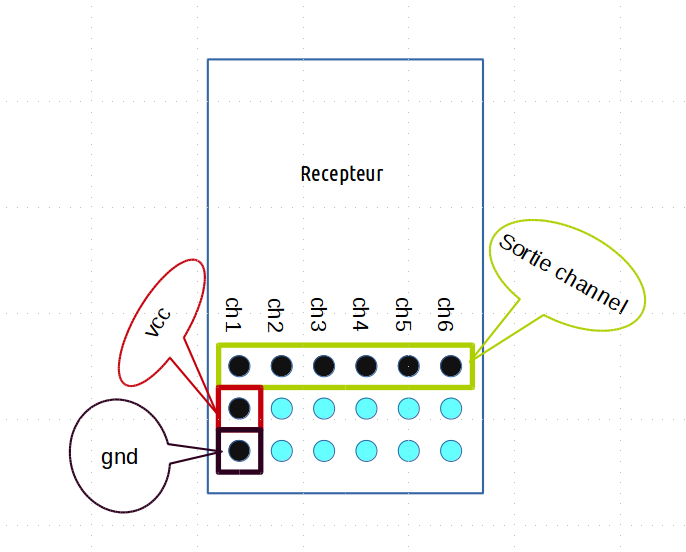
L'orsque vous achetez votre radiocommande vous devrez choisir votre configuration de commande appeller Mode cliquez sur l'image suivante pour voir ou se trouve les commandes du PITCH,ROLL,YAW,GAZ en fonction du Mode, la deuxiéme image représente le récepteur.
- RADIOCOMMANDE
- RECEPTEUR
- Hélices
-Les hélices permettent a notre drone de se déplacer, elle pousse l'air a une grande vitesse derriére est nous avons depuis Newton que toute masse soumise a une force (action) oppose a celle si une force égale (contre-réaction) ce qui crée la poussée. Pour choisir ses hélices il ya plusieurs caractéristiques a prendre en compte.
-Le pas géométrique
Petit pas = plus grande traction à faible vitesse, mais vitesse maxi limitée.
Grand pas = plus petite traction à faible vitesse, mais vitesse maxi élevée.
-La taille des hélices
Grande Hélice = beaucoup de portance → vol stable mais a besoin de puissance pour faire 1 tour entier → moteur important.
Petite Hélice = peu de portance → vol moins stable et à besoin de moins de puissance pour faire 1 tour entier → moteur faible.
-Nombre de pales
nombre de pales élevés = poussée plus élevée → rendement énergétique plus faible.
nombre de pales faibles = poussée plus faible → rendement énergétique élevé.
Pour augmenter la poussée vous pouvez augmentez la taille des hélices mais cela a ses limites vous risquez d'arracher le rotor de votre moteur ou de crée une usure prématuré des roulements, pour notre drone prenez des hélices de "12" pouces maximum, personnellemnt j'utilise des hélices 1045 soit "10" pouces 25cm avec un pas de 4.5.
- Batterie & Chargeur
Pour les drones on utilise des batterie lithion-ion-polymére qui on pour avantage de disposer d'une bonne densité énetgétique (Volume par unité d'energie) et la batterie est légére car elle na pas d'envellope de métal . L'orsque vous acheterez une batterie il ya plusieurs informations a prendre en compte la tension "Voltage" la capacité "mah" et le taux de décharge.
-Une cellules de batterie Lipo a une tension nominale de 3.7v est maximale de 4.2v Vous verrez sur les batteries "2S,3S,4S,6S" notre batterie est une 3S ce qui veut dire que nous avons acheté une batterie avec 3 cellules en serie ce qui nous donnent une tension totale "11.1 = 3*3.7" et 12.6v Max. Une cellule Lipo ne doit pas decendre en dessous de 3V laisser une marge de sécurité posser votre drone a 3.5v par cellules.
-La capacité de la batterie s'exprime en ampéres/H ou plus souvent en milliampére/h sur les batteries. Si vous avez une batterie de 6000mah sa veut dire que si votre systéme consomme 6 ampéres vous aurez une autonomie d'une heure.
- Le capacité de decharge correspond au nombre d'ampéres maximum que l'on peut demander a notre batterie, exemple si vous avez une batterie 30C de 3000 mah vous pourrez demander a la batterie "90 = 30 3" 90 ampéres. Un moteur consomme maximum 15AH ce qui fait "415 = 60" 60AH alors il faut prendre une batterie qui peut nous donner environ deux fois le courant demander soit 120AH.
-Pour charger des batterie Lipo il faut un chargeur spécial qui va equilibré les cellules entre elle et elle ne supporte pas les surcharges et le chargeur suit une procédure bien définit en debut de charge le voltage monte progressivement j'usqua atteindre 4.2v a partir de ce moment plus l'accumulateur sera remplie plus l'amperage demandé par la Batt diminue quand l'ampérage demandé descend en dessous de 3% de la capacité de votre Batt la Batt est complétement remplie. Il faut aussi dire a notre chargeur combien d'ampéres il va délivré, les batteries Lipo accepte maximum un ampérage equivalent a deux fois sa capacité "2C" cela veut dire que votre batterie sera rechargé en 30 minutes plutot rapide mais a un désavantage vous diminuer la durée de vie de votre Batt je vous conseille de recharger en "1C" soit une fois la capacité de la Batt.
- Montage composant & soudure
Si vous avez le matérielle nécessaire pour réaliser des circuit imprimée est vous voulez transferez le circuit sur la plaque en cuivre en utilisant de l'acetone et alcool ou en utilisant le transfert par chaleur avec un fer a repasse, imprimée avec une imprimante laser les fichiers "PCB-FC.pdf" et "PCB-power distrib.pdf". Les deux autres fichier "PCB-FC-négatif.pdf" et "PCB-power distrib-négatif.pdf" sont utile si vous faites vos circuit imprimée avec une insoleuse. Si vous n'avez pas le materielle nécessaire suivez les instructions suivante.
-Prennez votre radiocommande brancher le cable de bind si vous avez une Flysky fs-i6 allumez la et restez appuyez sur le bouton "Bind key" cela va permettre de crée la liaison entre la radiocommande est le recepteur puis restez appuyez sur le bouton "OK" qui vous méne vers un menu avec deux sous menu "System setup" et "Functions setup" déplacer vous avec les touches "up" et "down" sur le sous menu "Functions setup" et cliquez sur "OK" puis déplacez vous sur "Display" est cliquez "OK" est la vous verrez vos channels. Bougez vos commandes est vous verrez quel commande correspond a quel channel.
Si vous avez une RaDio Mode1 vous devriez avoir le "YAW" CH1, le "PITCH" CH2, les "GAZ" CH3, le "ROLL" CH4. Maintenant nous savons quel channel du recepteur transmet quel commande.
Si vous avez une RaDio Mode2 ou autre vos commande ne seront pas assigné au méme CH dites vous que pour l'arduino uno la pin digiital 8 doit recevoir du recepteur la commande du "YAW", la pin digital 9 le "PITCH", la pin digital 10 le "ROLL", la pin digital 11 les "GAZ" et pour l'arduino mega on suis la méme logique la pin digital 53 recoit le"YAW",pin digital 52 le "PITCH",pin digital 50 les "GAZ",pin digital 10 le "ROLL". Pour finir rendez vous dans le sous menu "Functions setup" rentrez dans Reverse et inverser la CH du "YAW" et du "PITCH". Si vous vous trompez dans l'ordre des soudures ne vous embétés pas a dessouder nous verrons plus tard dans la partie programme comment changer l'assignation des pin.
-ARDUINO UNO.
le + du recpteur au +5v
le _ du recepteur au gnd
CH1"YAW" du recepteur a la pin digital 8.
CH2"PITCH" a la pin digital 9.
CH3"GAZ" a la pin digital 10.
CH4"ROLL" a la pin digital 11.
-ARDUINO MEGA PRO MINI.
le + du recpteur au +5
le _ du recepteur au gnd
CH1"YAW" a la pin digital 53.
CH2"PITCH" a la pin digital 52.
CH3"GAZ" a la pin digital 50.
CH4"ROLL" a la pin digital 10.
passons au soudure tous dabord il faut souder un fil entre le "VCC" du MPU-2 et sa broche "ADO" puis relier le "VCC" des deux "MPU" sur le +3.3V de l'arduino, les deux "GND" sur un GND, les deux "SDA"(Serial data) sur "A4" les deux "SCL"(Serial clock line) sur "A5". Pour plus de solidité est éviter l'arrachement d'un fils réunissez les et faite une trésse.
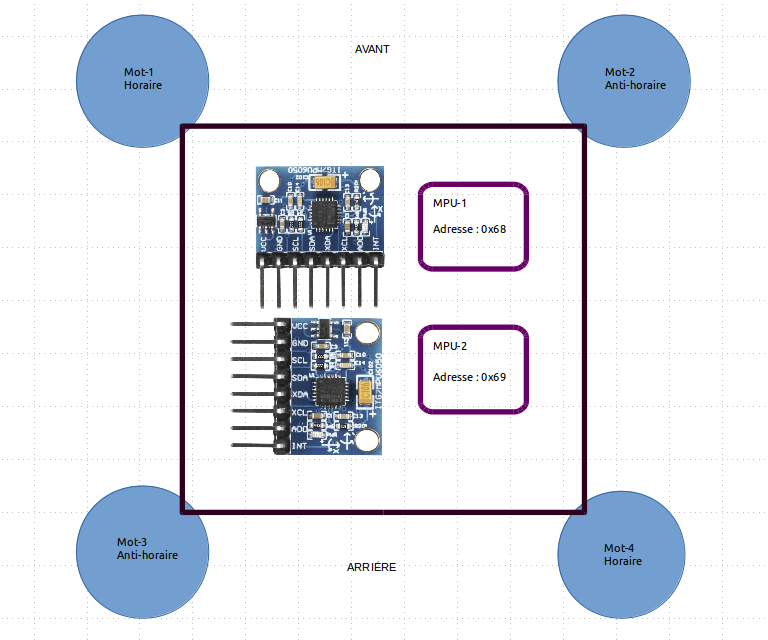
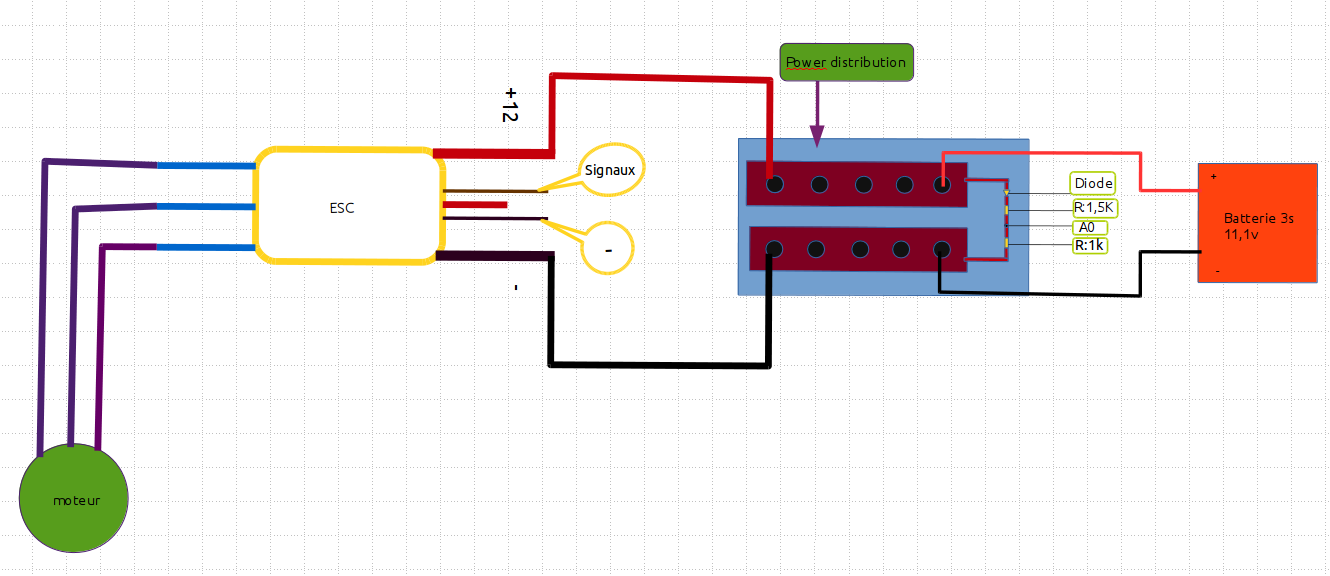
-Il reste alors les ESC a installée est a racorder a l'arduino, regarder l'image ci-dessous est vous verrez les deux fils d'alimentation (+12v,-) le fils signaux avec son gnd puis les trois fils moteur, rappeller vous nos moteur on trois phases et tous les moteurs de notre drone ne tourne pas dans le méme sens regarder de nouveau l'image ou il ya les deux gyroscopes vous verrez quel moteur tourne dans quel sens, horaire ou anti-horaire. Pour inverser le sens d'un moteur il suffit d'inverser le branchement des fils moteur. Maintenant nous allons souder aux arduino les fils du signaux de chaque ESC .
-ARDUINO UNO.
ESC.moteur1 a la pin digital 4
ESC.moteur2 a la pin digital 5
ESC.moteur3 a la pin digital 6
ESC.moteur4 a la pin digital 7
-ARDUINO MEGA PRO MINI.
le ESC.moteur1 a la pin digital 26
le ESC.moteur2 a la pindigital 27
le ESC.moteur3 a la pin 28
le ESC.moteur4 a la pin 29
Reliez tous les gnd des signaux au gnd de l'arduino.
Pour alimenter les quatre ESC il faut fabriquer une "Power distribution board" on va faire un circuit imprimée comme sur l'image ci-dessous, prenez votre plaque de cuivre est un marqueur indélébile est redessiner les partie en rouge puis tremper la plaque de cuivre dans une solution de perchlorure de fer est agiter doucement il devrait rester que les parties colorier, les deux rectangle et le diviseurs de tension , mes a quoi le diviseur de tension peut il servir ? l'arduino ne peut mesurer que des tensions inferieur ou égale a 5v notre batterie fait 12.6v pour pouvoir mesurer le niveau de charge de notre batterie et compenser la puissance des moteurs quand le voltage diminue, pour éviter d'avoir des commandes de moins en moin réactive au fils du vol il faut que l'arduino puisse mesurer le voltage alors nous méttons une diode avec deux resistances en serie est nous soudons un fil entre les deux resistances que nous relions a la pin analogique 0 .
Et voici le calcul qui nous permet de connaitre la valeur de "R1 = (U/U2)*R2-R2" je choisi une valeur de resistance arbitraire pour R2 elle doit tous de méme étre assez élever pour que notre circuit ne consomme pas trop de courant (I = U/R) on va prendre une valeur de 1000 Ohm, U represente la valeur de notre alimentation "12.6v", U2 la tension que l'on veut entre R1 et R2 donc 5v "R1=1520 =(12.6/5)*1000-1000" donc pour que U2 ou la broche Analogique 0 soit a 5v quand la batterie est a sa tention maximale il faut que R1 soit égale a 1520 Ohm, nous mettons une Resistance de 1.5k les 20 Ohm supplementaire n'ont pas un effet significatif et R2 1000 Ohm. Pour que votre dronne vous previennent l'orsque votre batterie est décharger branchez un "Buzzer" sur la pin digitale 13.
Conseil: l'orsque vous souderé la power distribution n'hésitez pas a mettre une couche d'etein sur les pistes avec les huit trous pour alimenter vos ESC il peut passer dans ces pistes un courant de 60 amperes et risque de crée une surchauffe.
L'orsque vous monté votre Drone découpé des piéces en chambre a air ou des pads en silicone pour les mettres entre les moteurs et les bras ne séré pas trop vos moteurs car le pouvoir enti vibrant sera limité, rajouté des piéces en chambre a air entre les bras des moteurs est les deux plaques qui les jointes sa permettra de limiter les vibrations et d'éviter au bras de bouger. Si vous placer votre arduino ou le Circuit imprimé entre les deux plaques placer le port USB de l'arduino prés des bords pour pouvoir téleverser les programmes. Mettez aussi du frein a filer sur les tiges filetés qui fixe les moteurs.
- Programme
-Le fichier "ESCALIB.ino" va nous permettre de calibrer les ESC , une fois le programme televerser ouvré le Serial taper "1" puis "Entrée", branchez la batterie puis taper "0" la vous entendrez trois "beep" cela signifie que votre batterie est une 3S pour finir rentrer "2" dans le Serial, vous verrez vos moteur montez en puissance jusqu'a leur puissance maximale puis ils éteignent . Si vous avez l'aruino mega pro mini il faut changer la declarations des pin en mode OUTPUT "DDRD |= B11110000;" en "DDRA |= B11110000;" et changer toutes l'activation des pins a l'état haut "PORTD |= mot;" en "PORTA |= mot;" et a l'etat bas "PORTD &= B00000000;" en "PORTA &= B00000000;".
Que fait notre programme ESCALIB.ino ?
L'orsque vous rentrez "1" l'arduino envoie au ESC chaque 8ms une impulsion de 2000us qui est la valeur maximaxe ce qui va mettre l'ESC en mode programmation puis quand on rentre "0" l'arduino envoie des impulsions de 1000us ce qui indique au ESC quel largeur d'impulsion est égale au moteur eteint, donc 2000us est égale a la vitesse maximale et 1000us au moteur eteint. Puis quand on rentre "2" on incremente une valeur a l'impulsion minimale j'usqu'a ateindre sa valeur maximale puis on retourne a une l'argeur d'impulsion de 1000us.
-Maintenant que nous avons nos ESC calibré rendez vous sur ce lien https://github.com/jrowberg/i2cdevlib est télécharger les fichier, dans tous ces fichier il ya deux bibliothéque qui nous intéresse "I2Cdev.h" et MPU6050.h une fois que vous les avez intégré les dans votre IDE, télecharger le programme ecrit par Luis RODENA qui se trouve dans le fichier "...." qui va nous permettre de calibrer nos deux Gyro.
Pour le faire il faut d'abord bien positionner votre drone a plat en utilisent un niveau a bulle, une fois qu'il est bien a plat on va pouvoir televerser le programme dans notre arduino. Mais nous avons deux Gyro a calibrer nous allons les calibrer un a la fois pour savoir lequel des deux nous sommes entrein de calibrer il faut connaitre l'adresse de chaque Gyro notre MPU-1 a pour adresse "0x68" et MPU-2 "0x69". Regarder le programme vous verrez cette ligne "MPU6050 accelgyro(0x69);" pour pouvoir changer de Gyro il suffit de changer l'adresse qui est entre parenthése par l'adrresse de votre Gyro.
Une fois que vous avez choisi l'adresse téleverser le programme, pour le lancer ouvré le Serial est rentré un caractére au hasard aprés une trentaine de seconde vous verrez apparaitre une ligne avec ecrit "Sensor readings with offsets" suivie de six nombre qui doivent etre proche de la suite suivante "0 0 16384 0 0 0",la ligne suivante ou il ya ecrit "Your offsets" suivie de six nombre "-3771 -1100 1106 -10 70 -8" se sont vos valeurs de calibration pour les trois axes de l'accelerométre est les trois axes du gyroscopes. Faites cette opération pour les deux Gyro puis ouvrez le fichier "...." si vous utilisez l'arduin uno ou "...." pour l'arduino mega pro mini est remplacer les six valeurs suivante pour chaque Gyro par vos valeurs d'offset.
mpu.initialize(); //MPU-1 = 0x68
mpu.setXAccelOffset(-3771);
mpu.setYAccelOffset(-1100);
mpu.setZAccelOffset(1106);
mpu.setXGyroOffset(-10);
mpu.setYGyroOffset(70);
mpu.setZGyroOffset(-8);
mpu1.initialize(); //MPU-2 = 0x69
mpu1.setXAccelOffset(497);
mpu1.setYAccelOffset(1703);
mpu1.setZAccelOffset(1148);
mpu1.setXGyroOffset(-629);
mpu1.setYGyroOffset(206);
mpu1.setZGyroOffset(-8);
Normalement apres avoir televerser le programme "FCuno.ino" votre dronne est prét a voler. Pour eviter les accidents il faut faire une combinaison de mouvement avec les stick pour allumer les moteurs et que votre drone soit prét a décoller ou une autre combinaison pour eteindre les moteurs.
-Décollage
-Eteindre
Conseil: Pour vous assurez que tous fonctionnent bien ou changer les coefficient PID faite un banc de test. Imprimée quatre piéces du fichier "N.calibras.stl" et coller les au millieux sur les cotés du drone et aligné bien les piéces pour pouvoir passer un rond de 6mm. Puis faites un cadre ou trouver deux endrois ou fixer les deux bouts du rond.
- Explication Programme
Notre programme recoit les commandes ordonné par notre radiocommande qui lui donne un angle a atteindre (Consigne) est les donnés du gyroscopes qui lui donne sa position actuelle est a la vitesse a laquelle le drone se déplace autour de ses trois axes,pour que le drone suive la consigne quon lui donne nous allons utiliser un régulateur P.I.D qui en fonction de la vitesse de déplacement du drone de sa position et de la consigne va distribuer la puissance des moteurs pour atteindre la consigne et se stabiliser.
-lecture des données recus par le recepteur
Pour calculer l'angle a atteindre il faut d'abord lire la largeur d'impulsion de chaque CH rappeller vous on en a parler dans la partie " Radiocommande & recepteur" pour lire la largeur on va utiliser les interruptions en mode "Changes" ce qui veut dire quells activent l'orsque l'état de la CH passent de l'etat haut(5v) a bas(0v) ou de bas a haut. Quand une interruption s'activent elle est prioritaire sur notre programme et lance une routine execution qui va faire les calculs pour connaitre la largeur d'impulsion. Une fois que le code de la routine est executer le programme reprend ou il ces arrété, si le code de la routine est trop volumineux votre programme ne fonctionnera pas car elle sera réappeller alors que l'execution du code n'est toujour pas finit.
Pour pouvoir les utiliser il faut declarer les interruptions le code suivant indique a l'arduino uno que les pins digital 8,9,10,11 vons etre uitliser comme interruptions en modes "Changes".
//N°bit = 76543210 //table de vérité "ou" = "1&0=1" "0&0=0" "1&1=1
//PCIRC = 00000000;
//PCMSK0 = 00000000;
PCICR |= (1 << PCIE0); //PCIRC = 00000001; on met le bit 0 du registre PCICR a 1
PCMSK0 |= (1 << PCINT0); //PCMSK0 = 00000001; on met le bit 0 du registre PCMSK0 a 1 Pin digital 8
PCMSK0 |= (1 << PCINT1); //PCMSK0 = 00000011; on met le bit 1 du registre PCMSK0 a 1 Pin digital 9
PCMSK0 |= (1 << PCINT2); //PCMSK0 = 00000111; on met le bit 2 du registre PCMSK0 a 1 Pin digital 10
PCMSK0 |= (1 << PCINT3); //PCMSK0 = 00001111; on met le bit 3 du registre PCMSK0 a 1 Pin digital 11
Pour bien comprendre le fonctionnement il faut imaginer un octet superposer a un autre octet ces pour sa que le "ou" est un comparateur de bit je vais donner des exemples
PCMSK0 = 00000000; // le registre PCMSK0 se représente sur un octet
l'orsque nous faisons |= (1 << PCINT0) il se passe la chose suivante nous créons un octet et nous faisons se décaler vers la gauche la valeur 1 de 0 bit "00000001" et on compare notre octet a l'octet du registre PCMSK0.
PCMSK0 = 00000000;
|= PCMSK0 = 00000001;
00000001;
l'orsque nous faisons |= (1 << PCINT1) il se passe la chose suivante nous créons un octet et nous faisons se décaler vers la gauche la valeur 1 de 1 bit "00000010" et on compare notre octet a l'octet du registre PCMSK0.
PCMSK0 = 00000001;
|= PCMSK0 = 00000011
00000010;
Maintenant que nous avons déclarée nos interruptions au pins 8,9,10,11 nous pouvons allez dans notre routine d'execution et taper notre code pour calculer la largeur d'impulsion.
ISR(PCINT0_vect) //routine execution qui s'activent a chaque changement d'etat
{
current_time = micros(); // on lance un timer et on stoke T0
if (PINB & B00000001) { // SI pin digital 8 est a l'etat haut on execute le code entre les accolades
if (previous_state[0] == LOW) { // Si la variable previous_state[0] est égale a LOW
previous_state[0] = HIGH; // previous_state[0] est égale a HIGH
timer[0] = current_time; // on stoke T0 dans timer[0]
}
} else if(previous_state[0] == HIGH) { // SI pin 8 a l'etat bas et que previous_state[0]==HIGH
previous_state[0] = LOW; // previous_state[0] est égale a LOW
pulse_duration[0] = current_time - timer[0]; Durée a l'état haut T1-T0
}
}
Pour bien comprendre imaginés que la pin D8 est a l'état bas(LOW) quand on allume le drone la pin D8 passe a l'état haut alors la routine d'execution s'activent on stoke dans la variable "current_time" le temps actuelle prenont une valeur arbitraire a titre d'exemple "current_time = 1000us" aprés nous testons une condition Si pin D8 est a l'etat haut on execute le code entre les accolades dans ces accolades il ya un autre test de condition Si la variable "previous_state[0]" est a l'etat bas et elle les car nous venons juste d'allumer l'arduino est la variable est initialiser a 0 soit etat bas on passe alors "previous_state[0]" a l'etat haut et on stoke le temps actuelle dans timer[0] soit 1000us, le prochain test de condition "else if(previous_state[0] == HIGH)" est faux et n'execute pas le code entre les accollades car les test de condition est fault car "if (PINB & B00000001)" est vrai. Puis nous sortons de la routine d'exe est l'arduino recommence a executer le code la ou il c'était arrété. L'orsque la pin D8 change d'etat a nouveau sa veut dire pour nous quel va passer de l'état haut a l'etat bas la routine exe se relance on stoke comme a chaque nouvelle rentré dans la routine le temps actuelle dans "current_time = 2500us" cette fois si la condition "if (PINB & B00000001)" est fausse donc le code entre les accolades ne s'execute pas mais la condition "else if(previous_state[0] == HIGH)" est vrai car la premiere condition est fausse est "previous_state[0]" avais été mis a l'etat haut "HIGH" alors on execute le code entre accolades on repasse "previous_state[0]" a l'etat bas "LOW" est ont soustrait le temps stoker dans "timer[0] = 1000us" l'or de la premiére activation de la routine au temps actuelle soit "current_time = 1500us" ce qui fait "pulse_duration[0] = 2500-1000;", maintenant nous pouvons connaitre la largeur d'impulsion de chaque CH ROLL, PITCH, YAW, GAZ.
Rappelez vous notre recepteur envoie a notre controleur de vol des largeurs d'impulsion entre 1000us et 2000us l'orsque vous ne touchez pas les commandes du PITCH, ROLL, YAW de votre radiocommande la largeur d'impulsion est de 1500us ce qui veut dire que vous demandez a votre drone d'étre a plat "PITCH = 0°, ROLL = 0°, YAW = 0°/S" pour les GAZ 1000us signifie GAZ = minimum et 2000 us GAZ = maximum. Maintenant nous allons voir le code qui permet de transformez les largeurs d'impulsions en consigne.
void consigne(){
ConsG = 0; // A chaque boucle du programme on met la variable ConsG = "GAZ" a 0
ConsP = 0; // A chaque boucle du programme on met la variable ConsP = "PITCH" a 0
ConsR = 0; // A chaque boucle du programme on met la variable ConsR = "ROLL" a 0
ConsY = 0; // // A chaque boucle du programme on met la variable ConsY = "YAW" a 0
chanel1 = pulse_duration[2]; // on stoke la largeur d'impulsion CH "GAZ" dans la variable chanel1
chanel2 = pulse_duration[1]; // on stoke la largeur d'impulsion CH "PITCH" dans la variable chanel2
chanel3 = pulse_duration[3]; // on stoke la largeur d'impulsion CH "ROLL" dans la variable chanel3
chanel4 = pulse_duration[0]; // on stoke la largeur d'impulsion CH "YAW" dans la variable chanel4
if (chanel1 < 1000) chanel1 = 1000; // on limite les valeurs entre 1000 et 2000
if (chanel1 > 1800) chanel1 = 1800;
if (chanel2 < 1000) chanel2 = 1000;
if (chanel2 > 2000) chanel2 = 2000;
if (chanel3 < 1000) chanel3 = 1000;
if (chanel3 > 2000) chanel3 = 2000;
if (chanel4 < 1000) chanel4 = 1000;
if (chanel4 > 2000) chanel4 = 2000;
Maintenant qu'on a stoké les valeurs du "PITCH, ROLL, YAW, GAZ" est qu'on a limité les valeurs dans un intervalle [1000;2000] on va séparé les intervalles en deux parties " ROLL = [1000<=gauche<1500>droite<=2000], PITCH = [1000<=avant<1500>arriére<=2000] , YAW = [1000<=droite<1500>gauche<=2000] pour les GAZ nous n'avons pas besoins de separer en deux l'intervalle. Comme le signal a du bruit il n'est pas parfaitement constant a 1500 ces pour ca que nous laisons une marge de 16us.
//gaz
if (chanel1 >1008){ // Si strictement plus grand que 10008 allumage des moteurs
ConsG = chanel1;
}
//Pitch
if (chanel2 >1508){ // SI strictement plus grand que 1508 "PITCH" vers l'arriére arriére
ConsP = (chanel2-1508);
}else if (chanel2 < 1492){ //sinon SI strictement plus petit que 1492 "PITCH" vers l'avant
ConsP = (chanel2-1492);
}
//Roll
if (chanel3 >1508){ // SI strictement plus grand que 1508 "ROLL" vers la droite
ConsR = (chanel3-1508);
}else if (chanel3 < 1492){ //sinon SI strictement plus petit que 1492 "ROLL" vers la gauche
ConsR = (chanel3-1492);
}
//Yaw
if (chanel4 >1508){ // SI strictement plus grand que 1508 "YAW" vers la gauche
ConsY = (chanel4-1508);
}else if (chanel4 < 1492){ //sinon SI strictement plus petit que 1492 "YAW" vers la droite
ConsY = (chanel4-1492);
}
Si sur votre radiocommande vous poussez le stick du Roll sur la droite et que la largeur d'impulsion dépassent 1508, on soustrait 1508 a la valeur recu ce qui nous donne une Consigne qu'il faut convertir en angle a atteindre et nous savons que la largeur d'impulsion et au maximum 2000us il faut alors definir quel angle correspond a 2000us sa sera l'inclinaison maximale du drone. Imaginez maintenant que vous poussez le stick du ROLL a droite en bout de course "chanel3 = 2000" ce qui fait "ConsR = 2000-1508 = 492" est nous voulons que cette valeur représente 30.75° alors il faut que quand notre gyroscope indique 30.75°, ConsR soit égale a 0 alors si notre drone a une inclinaison de 30.75° il faut que l'angle soit multiplier par un coefficient et que le produit de cette multiplication soit égale a 492. Voici le calcul "492/Anglemax = coefficient" si dessous vous avez un exemple les variables anglemaxP et anglemaxR stocke le produit des multiplication entre les coefficients est l'angle actuelle pour l'axe du "ROLL" et du "PITCH" puis on soustrait les produit aux consigne et enfin on divise par trois pour limiter la vitesse de déplacement autour des axes a 164 °/S "492/3 = 164". Pour l'axe du "YAW" on ne fixe pas d'angle maximale mes une vitesse de deplacement maximale.
anglemaxP = 16 * angleP; // 2000-1508 = 492 , 492/16 = 30.75°, 492/30.75 = 16
anglemaxR = 16 * angleR;
ConsP -= anglemaxP ;
ConsP /= 3; // limitation de la vitesse de deplacement a 164°/S "492/3=164"
ConsR -= anglemaxR;
ConsR /= 3;
ConsY /= 3;
Maintenat que nous avons les consignes de nos trois axes nous allons utiliser un régulateur P.I.D pour controler la position du drone mais d'abord je vais vous expliquer le fonctionnement de ce régulateur.
le régulateur P.I.D va calculer les erreurs Proportionnelle.intégrale.Dérivée entre les Consignes et les mesures du Gyro pour chaque axe, et ont multiplie chaque erreurs par un coefficient puis on fait la sommme des trois erreurs qui sera notre commande a envoyer au moteur, chaque erreur na pas les mémes effets sur notre systéme.
-L'erreur Proportionnelle correspond a l'écart entre la valeur mesurée et notre Consigne, cette ecart est multiplié par un coefficient plus il est grand plus votre systéme atteindra sont objectif rapidement mais un coeff trop grand crée des oscillations qui destabilise votre systéme, un coeff trop petit ne nous permettra pas d'atteindre l'objectif il faut alors trouver un bon compromis entre la vitesse pour atteindre l'objectif et de trop grand dépassement. Si nous utilisons seulement l'erreur proportionnelle le systéme oscilleré et n'arriverais pas a se stabiliser dans le temps sur l'objectif(Erreur statique).
-L'erreur intégrale fait la somme des erreurs Prop au fil du temps cette erreur est complementaire a l'erreur Prop elle permet de reduire l'erreur statique dans le systéme si le coeff de l'erreur intégrale est trop élever cela crée des oscillation est des grands dépassement de la consigne si il est trop faible votre systeme derivera est ne maintiendra pas l'objectif.
-L'erreur dérivé, soustrai l'erreur Prop précédente a l'erreur Prop actuelle elle permet a notre systéme d'anticiper les déplacements donc dévité les dépassements de consigne si votre coeff dérivé est trop élevé vous verrez votre systéme oscillé a haute fréquence si il est trop bas il y aura des dépassements de consigne important.
Si vous voulez voir les differents effets des coefficiens des erreurs "Prop,Int,Dev" regardez cette video :https://www.youtube.com/watch?v=uXnDwojRb1g.
Sur votre banc de test faite varier les coefficients en fonction de vos préférence.
float KYP = 6; // Coefficient Erreur Prop "YAW"
float KYI = 0.22; // Coefficient Erreur intégrale "YAW"
float KYD = 0; // Coefficient Erreur dérivé "YAW"
float KRP = 1.3; // Coefficient Erreur Prop "ROLL"
float KRI = 0.04; // Coefficient Erreur integrale "ROLL"
float KRD = 18; // Coefficient Erreur dérivé "ROLL"
float KPP = 1.3; // Coefficient Erreur Prop "PITCH"
float KPI =0.04; // Coefficient Erreur intégrale "PITCH"
float KPD = 18; // Coefficient Erreur derivé "PITCH"
void PID(){
EpropP = ASP - ConsP; //erreur proportionnelle "PITCH"
EpropR = ASR - ConsR; //erreur proportionnelle "ROLL"
EpropY = ASY - ConsY; //erreur proportionnelle "YAW"
EintP += EpropP; //erreur intégrale "PITCH"
EintR += EpropR; //erreur intégrale "ROLL"
EintY += EpropY; //erreur intégrale "YAW"
if ( EintP > 400 ) EintP = 400; // on limite les valeurs de l'intégrale pour éviter d'avoir des valeurs disproportionner
if ( EintP < -400 )EintP = -400; qui engendrerées des dépassement effet "WindUp"
if ( EintR > 400 ) EintR = 400;
if ( EintR < -400 )EintR = -400;
if ( EintY > 400 ) EintY = 400;
if ( EintY < -400 )EintY = -400;
EdevP = EpropP-lastEP; //erreur derivée "PITCH"
EdevR = EpropR-lastER; //erreur derivée "ROLL"
EdevY = EpropY-lastEY; //erreur derivée "YAW"
lastEP = EpropP; // On stoke l'erreur précédente du "PITCH"
lastER = EpropR; // On stoke l'erreur précédente du "ROLL"
lastEY = EpropY; // On stoke l'erreur précédente du "YAW"
EPIDR = KRP * EpropR + KRI * EintR + KRD * EdevR; // Somme des erreurs pour l'axe du "ROLL"
EPIDP = KPP * EpropP + KPI * EintP + KPD * EdevP; // Somme des erreurs pour l'axe du "PITCH"
EPIDY = KYP * EpropY + KYI * EintY + KYD * EdevY; // Somme des erreurs pour l'axe du "YAW"
if ( EPIDP > 400 ) EPIDP = 400; // on limite les valeurs de sortie pour quel reste coherente avec les valeurs que l'on
if ( EPIDP < -400 )EPIDP = -400; enverra au moteur
if (EPIDR > 400 ) EPIDR = 400;
if (EPIDR < -400 )EPIDR = -400;
if ( EPIDY > 400 ) EPIDY = 400;
if ( EPIDY < -400 )EPIDY = -400;
}
Maintenant on va voir la partie du code qui va nous permettre de calculer les valeurs que l'on va envoyer aux ESC de chaque moteur en fonction des sorties du régulateur PID .
void Signeauxcorrec(){
if ( decollage == 1){
mot1 = ConsG-EPIDR-EPIDP-EPIDY;
mot2 = ConsG+EPIDR-EPIDP+EPIDY;
mot3 = ConsG-EPIDR+EPIDP+EPIDY;
mot4 = ConsG+EPIDR+EPIDP-EPIDY;
}
On rajoute la consigne GAZ a tous les moteur et nous soustrayons ou additionnons les sorties du controleur PID en fonction du signe de ses sorties, pour comprendre le mieux est de voir des exemples.
Imagines votre drone qui se deplace autour de l'axe du "PITCH" vers l'avant a une vitesse de -10°/S est que votre Consigne est égale a 0 donc votre programme doit monter la puissance des deux moteur a l'avant "mot1, mot2" et baisser la puisssance des moteurs arriéres "mot3, mot4". Le regulateur PID fait ce calcul "EpropP =-10-0" la valeur de sortie et négative -10 alors il faut que l'orsque j'ajoute -10 au "mot1, mot2" la valeur doit étre positive + 10 et restez négative pour "mot3, mot4", pour que sa soit positif il suffit de mettre - car "0--10" = +10 est mettez + pour que la valeur se soustrai "0+-10 = -10".
Exemple Détaillé.
KPP = 1; // Contexte : Pitch = -2°, Pitch = -10°/S, Consigne Pitch = 0°
KPI = 1;
KPD = 1
anglemaxP = 16 * angleP; // -32 = 16*-2;
ConsP -= anglemaxP ; // 32 = 0--32;
EpropP = ASP - ConsP; // -42 = -10-32;
EintP += EpropP; // -42 = 0 + -42;
EdevP = EpropP-lastEP; -42 - 0;
EPIDP = KPP * EpropP + KPI * EintP + KPD * EdevP; // -126 = 1 * -42 + 1 * -42 + 1 * -42;
mot1 = ConsG-EPIDR-EPIDP-EPIDY; //1326 = 1200 - 0 --126 - 0;
mot2 = ConsG+EPIDR-EPIDP+EPIDY; // 1326 = 1200 + 0 --126 + 0;
mot3 = ConsG-EPIDR+EPIDP+EPIDY; // 1074 = 1200 - 0 +-126 + 0;
mot4 = ConsG+EPIDR+EPIDP-EPIDY; // 1074 = 1200 + 0 +-126 - 0;
Si a l'inverse le drone se deplace autour de l'axe du "PITCH" vers l'arriére a une vitesse de 10°/S est que votre Consigne est égale a 0, il faut alors baissé la puissance de "mot1, mot2" est augmentez la puissance de "mot3, mot4". "EpropP =10-0" la valeur de sortie est positive +10 pour le "mot1, mot2" sa fait "0-+10 = -10" et pour "mot3, mot4" sa fait "0++10= +10.
Exemple Détaillé.
KPP = 1; // Contexte : Pitch = 2°, Pitch = 10°/S, Consigne Pitch = 0°
KPI = 1;
KPD = 1
anglemaxP = 16 * angleP; // 32 = 16*2;
ConsP -= anglemaxP ; // -32 = 0-32;
EpropP = ASP - ConsP; // 42 = 10--32;
EintP += EpropP; // 42 = 0 + 42;
EdevP = EpropP-lastEP; 42 - 0;
EPIDP = KPP * EpropP + KPI * EintP + KPD * EdevP; // 126 = 1 * 42 + 1 * 42 + 1 * 42;
mot1 = ConsG-EPIDR-EPIDP-EPIDY; //1074 = 1200 - 0 -126 - 0;
mot2 = ConsG+EPIDR-EPIDP+EPIDY; // 1074 = 1200 + 0 -126 + 0;
mot3 = ConsG-EPIDR+EPIDP+EPIDY; // 1326 = 1200 - 0 +126 + 0;
mot4 = ConsG+EPIDR+EPIDP-EPIDY; // 1326 = 1200 + 0 +126 - 0;
La prochaine partie va mesurée le voltage de la batterie et ajuster la puissance de chaque moteur et limiter les valeurs pour quel soit cohérente avec nos ESC,vous pouvez régler la valeur limite basse de vos moteurs cette valeur c'est la vitesse de vos moteur quand vos GAZ seront a zero si vous la montez un peut est que vous mettez les gaz en position zero votre dronne retombera moins vite si vous l'augmentez trop votre drone decollera alors que vous n'avez pas touché les GAZ . Si la batterie est en dessous de 3.3v par cellules le buzzer s'activent.
void Signeauxcorrec(){
if ( decollage == 1){ // L'orsque le decollage est activé
//on mesure le voltage de la batterie et on filtre le signal
batterieV = batterieV * 0.92 + (analogRead(0) + 65) * 0.09853;
// on incrémente les valeurs au moteur en fonction du voltage
if ( batterieV < 1240 && batterieV > 800){
mot1 += mot1 * ((1240 - batterieV)/(float)3500);
mot2 += mot2 * ((1240 - batterieV)/(float)3500);
mot3 += mot3 * ((1240 - batterieV)/(float)3500);
mot4 += mot4 * ((1240 - batterieV)/(float)3500);
}
//on active le buzzer Si le voltage de la batterie est plus petit que 10V
if ( batterieV < 1000 ){
digitalWrite(13,HIGH);
}else{
digitalWrite(13,LOW);
}
// on limite les valeurs de chaque moteur quand
if (mot1 < 1100) mot1 = 1050; // valeur basse
if (mot1 > 2000) mot1 = 2000; // valeur haute
if (mot2 < 1100) mot2 = 1050;
if (mot2 > 2000) mot2 = 2000;
if (mot3 < 1100) mot3 = 1050;
if (mot3 > 2000) mot3 = 2000;
if (mot4 < 1100) mot4 = 1050;
if (mot4 > 2000) mot4 = 2000;
} else{ // valeur a l'arret
mot1 = 1000;
mot2 = 1000;
mot3 = 1000;
mot4 = 1000;
}
}
Vous avez surement vue la variable "decollage" mais je ne vous et pas dit a quoi elle pouvée servir. Elle permet d'éviter les démarges intempéstif des moteurs si par accident vous tomber votre radiocommande. Pour que vos moteur démarre et que votre drone sot prét a décoller il faut faire une combinaison de mouvement de stick, pareil si vous voulez eteindre les moteurs du drone il faut faire une autre combinaison. La partie de code suivante va tester les CH pour connaitre nos mouvement de stick et mettre la variable décollage a 1 "moteur allumer prét a decollé" ou decollage a 0 "moteur a "l'arret".
void activation(){
// Si les conditions sont vraie change la variable decollage est on appelle la fonction resetvariable()
if(decollage == 0 && chanel1 <= 1008 && chanel4 > 1980 && chanel3 > 1980){
decollage = 1;
resetvariable(); // On met les variables du regulateur PID a 0
}
// Si les conditions sont vraie on change la variable decollage
if(decollage == 1 && chanel1 <= 1008 && chanel2 > 1980 && chanel4 < 1008){
decollage = 0;
}
}
Nous allons voir le code qui va envoyer au ESC l'impulsion entre [1000us & 2000us] il va aussi fixer la frequence du programme a 250 Hz.
void transmission(){
while (micros()-prevmicros < 4000); // si notre boucle a pris moins de 4ms on attend.
prevmicros = micros(); //on stocke le temps écoulé
PORTD |= B11110000; // On met a l'etat haut les pins digitales 4,5,6,7,8
while( PORTD >= 16){ // Si l'une des pins est a l'etat haut on boucle
prelmicros = micros(); // on stocke le temps écoulé
if ( (mot1 + prevmicros) <= prelmicros) PORTD &= B11101111;
if ( (mot2 + prevmicros) <= prelmicros) PORTD &= B11011111;
if ( (mot3 + prevmicros) <= prelmicros) PORTD &= B10111111;
if ( (mot4 + prevmicros) <= prelmicros) PORTD &= B01111111;
}
}
Dans cette petite partie du programme on met toute les broches des ESC a l'etat haut puis on boucle temps que toute les pins sont a l'etat haut. Dans la fonction while on rajoute au temps stocké dans la variable "prevmicros" les valeurs de nos moteurs puis on met les broches a l'etat bas une fois que le temps actuelle stocké dans "prelmicros" et égale ou dépasse "mot+prevmicros", une fois que toute les broches sont a l'état bas "PORTD = 00001111" ce qui vaut 15 en décimal alors on sort de la boucle du while().
Nous allons voir le code qui permet de configurer le deux gyroscopes et accélérométres. Récupéré les données brute et les transformés en angle° et en angle°/S.
#include <Wire.h>
void communication(){
Wire.beginTransmission(MPU_ADDRESS); // on envoie l'adresse 0x68 au MPU-1 (Slave) pour lancer la transmission
Wire.write(0x6B);// on ecrit un octet qu'on place en attente pour communiquer avec le registre PWR_MGMT_1
Wire.write(0x00);// on ecrit un octet qu'on place en attente pour configurer la clock 8Mhz et l'alimentation
Wire.endTransmission(); // on evoie les octets mis en attente et on termine le transmission
Wire.beginTransmission(MPU_ADDRESS); // on envoie l'adresse 0x68 au MPU-1 (Slave) pour lancer la transmission
Wire.write(0x1B);// ..................... pour communiquer avec le registre GYRO_CONFIG
Wire.write(0x08);//........... on configure le plage de mesure du gyroscope 0°/S a ±500°/s
Wire.endTransmission(); // on evoie les octets mis en attente et on termine le transmission
Wire.beginTransmission(MPU_ADDRESS); // on envoie l'adresse 0x68 au MPU-1 (Slave) pour lancer la transmission
Wire.write(0x1C); // ..................... pour communiquer avec le registre ACCEL_CONFIG
Wire.write(0x10); //........... on configure le plage de mesure de l'accélérométre j'usqua ±8g
Wire.endTransmission(); //on evoie les octets mis en attente et on termine le transmission
Wire.beginTransmission(MPU_ADDRESS); // on envoie l'adresse 0x68 au MPU-1 (Slave) pour lancer la transmission
Wire.write(0x1A); // ..................... pour communiquer avec le registre CONFIG
Wire.write(0x03); // ................pour activer un filtre passe bas ~43Hz
Wire.endTransmission(); //on evoie les octets mis en attente et on termine le transmission
}
On suit la meme procedure pour MPU-2. Si vous voulez changer les plage de mesure des Gyros vous avez le choix "250°/S, 500°/S, 1000°/S, 2000°/S" et pour l'accélérométre "+2g, +4g, +8g, +16g".
Pour configurer le Gyro.
0x00 = 250°/S SSF_GYRO 131
0x08 = 500°/S SSF_GYRO 65.5
0x10 = 1000°/S SSF_GYRO 32.8
0x18 = 2000°/S SSF_GYRO 16.4
Pour configure l'Accel.
0x00 = +2g
0x08 = +4g
0x10 = +8g
0x18 = +16g
La prochaine partie de code nous permet de récupéré les données brutes des trois axes du gyroscope de l'accélérométre et la température.
Wire.beginTransmission(MPU_ADDRESS); // on envoie l'adresse 0x68 au MPU-1 (Slave) pour lancer la transmission
Wire.write(0x3B); // on ecrit un octet qu'on place en attente pour communiquer avec le registre ACCEL_XOUT_H
Wire.endTransmission(); // on envoie l'octet mis en attente et on termine le transmission
Wire.requestFrom(MPU_ADDRESS, 14); // On demande les 14 octets en partan de ACCEL_XOUT_H
while (Wire.available() < 14); // tan que les 14 octets ne sont pas recu on attend.
Rollacc = Wire.read() << 8 | Wire.read(); // on stoke la valeur d'acceleration du "ROLL" dans la variable "Rollacc"
Pitchacc = Wire.read() << 8 | Wire.read(); // on stoke la valeur d'acceleration du "PITCH" dans la variable "Pitchacc"
Yawacc = Wire.read() << 8 | Wire.read(); //on stoke la valeur d'acceleration du "YAW" dans la variable "Yawacc"
temperature = Wire.read() << 8 | Wire.read(); // on stoke la temperature dans la variable "temperature"
Rollgyro = Wire.read() << 8 | Wire.read(); // on stoke la valeur brute du "ROLL" dans la variable " Rollgyro"
Pitchgyro = Wire.read() << 8 | Wire.read(); // on stoke la valeur brute du "PITCH" dans la variable " Pitchgyro"
Yawgyro = Wire.read() << 8 | Wire.read(); // on stoke la valeur brute du "YAW" dans la variable " Yawgyro"
La partie du code qui a du surement vous interpeller ses "Wire.read() << 8 | Wire.read()".Que fait cette ligne de code ? Elle appelle un octet le decale de 8 bits sur la gauche puis appelle un nouvell octet quel va comparer au premier avec le comparateur binaire "ou". La valeur finale et écrite sur deux octets, je vais vous montrer un exemple ci-dessous.
ACCEL_XOUT_H = 11000000 // premier octet appellé
ACCEL_XOUT_L = 00010000 // Deuxiéme octet appellé
N° 7 6 5 4 3 2 1 0
1 1 0 0 0 0 0 0
<<8
N° 15 14 13 12 11 10 9 8
1 1 0 0 0 0 0 0
| Wire.read(); = 1101000000010000
N° 7 6 5 4 3 2 1 0
0 0 0 1 0 0 0 0
Le Gyro meme au repos est trés sensible au vibration "bruit" ce qui a pour effet de faire dérivée notre mesure pour éviter cela a chaque fois que vous allumerez votre drone on va faire une moyenne du bruit pour chaque axe puis on le soustraira a la valeur brute.
void Emoyen(){
int max_samples = 2000;
for (int i = 0; i < max_samples; i++) { // moyenne n = 2000 on boucle 2000 fois
lectureMPU(); // on appelle les valeurs brutes
// on incrémentes les valeurs brutes pour chaque axe 2000 fois
Eroll += Rollgyro;
Epitch += Pitchgyro;
Eyaw += Yawgyro;
PORTD |= B11110000; // on mes nos moteur a 0
delayMicroseconds(1000);
PORTD &= B00001111;
delay(3);
} // 0n divise par l'effectif 2000 pour avoir la moyenne des variations au repos
Eroll /= max_samples;
Epitch /= max_samples;
Eyaw /= max_samples;
}
Aprés avoir fait la moyenne des variations. On va voir la partie qui va nous permettre de transformer les valeurs brutes du gyroscope en angle.
void ANgyro() {
// on soustrai a chaque boucle la moyenne des variations au valeurs brutes
Rollgyro -= Eroll;
Pitchgyro -= Epitch;
Yawgyro -= Eyaw;
// on calcul l'angle par integration
angleRO += (Rollgyro / (FREQ * SSF_GYRO));
anglePO += (-Pitchgyro / (FREQ * SSF_GYRO));
}
Pour calculer l'angle on intégre la rotation angulaire toute les 4ms vu que notre programme fonctionnent a 250 Hz. Notre valeur brute divisée par la valeur inscrite sur la datasheet en fonction de la plage de mesure que l'on a configurée nous donne la vitesse de déplacement °/S. Je vais vous donner des exemples si votre plage de mesure est de 500 °/S la valeur donner par la datashett ces 65.5 si l'on fait "500 * 65.5 = 32750" ce qui veut dire que la valeur brute maximale qu'on recevra sera 32750 quand le drone se déplace a 500°/S "32750 /65.5 = 500 °/S" nous savon que notre programme boucle toute les 4 ms si nous recevont 32750 ca veut dire que notre drone se deplace de 500 degrés en une seconde mes vue que nous savons qu'il c'est écoulé 4ms qui représente 1/250 de seconde on fait "500/250 = 2" se qui nous donne de combien de degrés ses déplacer le drone "2°" et a chaque boucle on incrémente l'angle parcouru pour avoir notre position en degrés.
Si vous avez choisi une autre plage de mesure changer la valeur de la variable "SSF_GYRO" plus votre plage de mesure est grande moins le Gyro est précis.
250 °/S Precision: 1/131 = 0.007°/S
500 °/S Precision: 1/65.5 = 0.015°/S
1000 °/S Precision: 1/32.8 = 0.03°/S
2000 °/S Precision: 1/16.4 = 0.06°/S
La suite du code dans la fonction ANgyro() va nous permettre de transferer l'angle du pitch vers le roll et vis versa en fonction du yaw. Imaginez votre drone penchez vers l'arriére si vous faites tournez le drone autour de l'axe du "YAW" les valeurs de l'axe du Roll et du PITCH ne changerez pas car elle ne suibissent pas d'acceleration.
void ANgyro() {
anglePO += angleRO * sin(Yawgyro * (PI / (FREQ * SSF_GYRO * 180))); // transfer du Roll sur le PITCH sinus(radians)
angleRO -= anglePO * sin(Yawgyro * (PI / (FREQ * SSF_GYRO * 180))); // // transfer du PITCH sur le ROLL sinus(radians)
}
// sin(-90) = -1 , sin(90) = 1, ( -30°= 30° * sin (90°)
Aprés avoir calculer les angles d'inclinaison avec le gyroscope nous allons calculer les angles avec l'accélérométre.
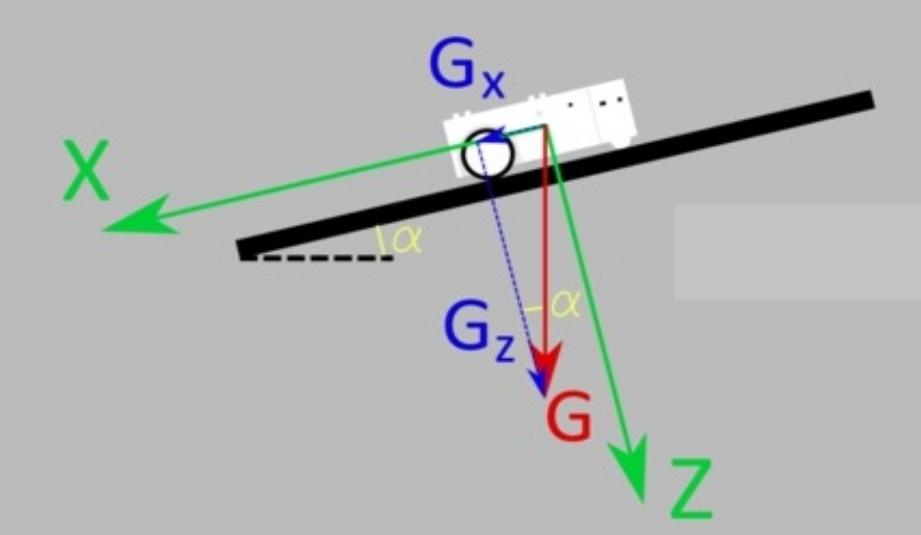
void ANacc(){
// Norme du vecteur acceleration ||X,Y,Z|| = √(X² + Y² + Z²): https://www.youtube.com/watch?v=tTaP48b4_5w
acc_total_vector = sqrt(pow(Rollacc, 2) + pow(Pitchacc, 2) + pow(Yawacc, 2));
if (abs(Rollacc) < acc_total_vector) {// on s'assure que la valeur reste entre -1 et 1 pour la fonction asin
RollaccA = asin((float) Pitchacc/ acc_total_vector) * (180 / PI);// on calcule l'angle en radians grace a la fonction asin
} puis on la covertie en degrés "180/3.14 = 1rad/57.32°
if (abs(Pitchacc) < acc_total_vector) { // on s'assure que la valeur reste entre -1 et 1 pour la fonction asin
PitchaccA = asin((float)Rollacc/ acc_total_vector) * (180 / PI);// on calcule l'angle en radians grace a la fonction asin
} puis on la covertie en degrés "180/3.14 = 1rad/57.32°
}
// arcsin prend le sinus de l'angle (Pitchacc(coté opposé)/ acc_total_vector(hypothénuse)) est renvoie l'angle.
Regardez l'image suivante.
Maintenant que nous avons les angles du Gyro et de l'accélérométre nous allons fusionner les deux mesures. Le Gyro a pour avantage de ne pas étre sensible au vibration mes la mesure dérive au contraire l'accélérométre ne dérive pas mes est trés sensible au vibration donc les deux mesures se compense et en les fusionnant on aura de meilleur résultat l'angle ne dérivera presque pas dans le temps.
Le Gyro dérive car nous prenons une valeur toute les ~4ms et nous considérons que la vitesse angulaire est la méme pendant les 4ms alors quand réalité ses faut. L'accélérométre ne dérive pas car il mesure l'angle en utilisant l'apesanteur terrestre 9.81 m-s. D'ailleurs nous verrons juste aprés dans la partie ou l'on fusionne les deux mesures et que plus votre programme a une frequence élevé moins nous utilisons la mesure de l'accelérométre.
void calculangle () {
if (initialized) {
// (gyro * (1-temps parcouru pour une boucle) + Accel * (temps parcourue pour une boucle)
angleRO = angleRO * 0.996 + RollaccA * 0.004;
anglePO = anglePO * 0.996 + PitchaccA* 0.004;
} else {
//La premiere mesure est faite seulement par l'accelerometrre
angleRO = RollaccA;
anglePO= PitchaccA;
initialized = true;
}
}
// Si vous voyez que votre angle dérive n'hésitez pas a modifier les coefficient utiliser pour la fusion des données.
Dans la prochaine partie on rajoute un second filtre pour ameliorez la precision puis on calcule est filtre la vitesse de déplacement "°/S" autour des axes.
void calculangle () {
angleR = angleR * 0.9 + angleRO * 0.1; // on utilise de nouveau un filtre complementaire
angleP = angleP * 0.9 + angleRO1 * 0.1;
// on calcule les "°/S" pour chaque axe est on les filtres "filtre passe-bas 10hz"
ASR = (ASR * 0.7) + ((Rollgyro / 65.5) * 0.3);
ASP = (ASP * 0.7) + ((Rollgyro1 / 65.5) * 0.3);
ASY = (ASY * 0.7) + ((Yawgyro/ 65.5) * 0.3);
}
Mon programme utilisent deux gyroscopes a 90° car l'axe du pitch ne fonctionne pas, le drone etait completement instable. J'ai essayer de trouver le probléme en regardant si l'angle du pitch indiquer par le Gyro correspondait a son angle réelle est je n'ai pas vue de probléme, je me suis dit que sa devais etre le régulateur PID j'ai alors tourner le gyroscope de 90° sur le drone de sorte que l'axe du PITCH du GYRO soit sur l'axe du ROLL du drone et le PITCH du drone sur l'axe du ROll du GYRO et mon drone et devenu instable sur l'axe du ROLL ce qui montre que le probléme ne vient pas du PID. J'ai aussi fait un "Self-test" qui nous permet de tester si le Gyro et l'Accel non pas de probléme mechanique ou électrique mais les résultat etait proche des valeurs d'usine. J'essayerais mon drone avec un seul Gyro neuf l'orsque je l'aurais recu. Pour l'instant avec les deux gyroscopes le drone fonctionnent bien et reste stable . Les programmes "" et "" n'utilisent qu'un Gyro essayait les sur un bac de test pour voir si sa fonctionnent.
- Amelioration
Le controleur de vol que nous avons fait est trés loin d'étre optimal pour plusieurs raisons.
-Le drone ne restera pas sur place, pour qu'il le reste il faudrait ajouté un magnétométre et un GPS qui nous permettrait d'avoir la position(longitude, latitude), l'altitude et la direction du drone. L'orsque vous n'actionnées pas les commandes du "ROLL" et du "PITCH" le programme stoke la position et l'altitude du drone grace au gps et un régulateur P.D va se charger de maintenire la position et l'altitude. Vous pouvez aussi implementez un programme qui en cas de perte de signal reviens vers vous dans ce cas il faut enregistrer la position quand vous faites d'écollé votre drone et l'altitude maximale atteinte pendant le vol. il faut definir une variable qui stok le gain d'altitude, quand on pert le signal le drone remontera a l'altitude maximale atteinte pendant le vol plus le gain d'altitude. Si vous voulez plus d'information je vous invite a aller voir l'exellente série de video de Joop Brokking: https://www.youtube.com/channel/UCpJ5uKSLxP84TXQtwiRNm1g
- La fréquence d'échantillonage de notre programme est de 250Hz pour le Gyro&Accel et le P.I.D ce qui est trés faible comparé au carte de vol disponible dans le commerce qui peuvent échantilloner facilement en 4Khz j'usqua 32Khz pour les meilleurs carte. Notre drone peut voler car il n'est pas particuliérement rapide et nerveu, les drones les plus rapide dépassent les 300K/MH sur ce type de drone notre controleur de vol ne pourrait pas fonctionné car notre drone parcour une distance trop grande alors que le Gyro na fait qu'une mesure. Haugmentez la frequence nécéssitent un réglage des filtres car le Gyro a un biais moin important vu que l'incrémentation de l'angle est faite plus souvent mais en contrepartie la sensibibilité au bruit augmente. Est la vous allez vous demander pourquoi on augmente pas la frequence en modifiant tous simplement la ligne de code suivante "while (micros()-prevmicros < 4000);" et la variable "FREQ" ? Les MiCro de l'arduino uno ou mega ont une frequence de 16Mhz et ne nous permette pas de faire tourner notre programme a plus de 250Hz l'arduino n'est pas fait pour de t'elle application il est généralement utiliser pour voir si un protype fonctionnent.
Les controleurs de vol disponible dans le commerce on en général des MiCro stm32 qui se decline en plusieurs versions "F4,F7,H7...." qui peuvent fonctionner a des fréquences beaucoup plus élevée 216Mhz pour le "F7" et ~450MHZ pour le "H7" les différentes version ont aussi plus ou moins de memoire ce qui permet de rajouter des fonctionnalités. Il existe une carte de dévellopement qui a un MiCro stm32 F7 "NUCLEO-F722ZE" avec cette carte vous pourrait lire les données du Gyro&Accel beaucoup plus vite et faire tourner aussi plus vite les régulateur P.I.D.
Maintenant que vous avez un MiCro plus performant on va s'interesser au différente centrale inertielle disponible sur le marcher.
-Le MPU-6000 a une bonne tolérance au vibration et peut communiquer les données du Gyro a 8Khz et de l'Accel a 1Khz en utilisant le protocole de communication SPI
-Le MPU-6050 que nous utilisons peut étre utiliser seulement avec le protocole de communnication I2C 400Khz qui limite la vitess delecture du Gyro a environ 2Khz et de l'Accel a 1Khz il et rarement utilisé sur les carte de vol.
-Le MPU-6500 peut fonctionner j'usqua 32Khz avec le protocole de communication SPI si vous avez un MiCro F4 ou F7.
-Le ICM20602 a été spécialement concu pour les drones il censé étre moins sensible au bruit et fonctionnent aussi en 32Khz mais d'aprés des tests il serait beaucoup plus sensible au bruit.
https://www.wearefpv.fr/filtres-betaflight-tuning-en-3-5-et-plus-20190202/
https://blog.dronetrest.com/inertial-sensor-comparison-mpu6000-vs-mpu6050-vs-mpu6500-vs-icm20602/
https://www.youtube.com/watch?v=bCEiOnuODac
Frame impression 3D .
Controleur de vol P.I.D: arduino Uno ou arduino Mega. https://www.youtube.com/watch?v=yRw2mC_6A00


