A relization for the Game of Amazons with AI robot using Verilog based on Xilinx Basys3
本项目是北京大学信息科学技术学院2020年春季学期《数字逻辑电路(实验班)》的系统设计大作业。本文档是第四小组作品《亚马逊棋》的项目设计报告。小组成员是:黄鑫懿、刘鹏。
本文包括:项目设计的目标和内容、项目的顶层模块设计、项目的模块手册、项目的总结。
本项目是一个仿红白机(Family Computer,又称FC机)的棋类游戏项目。本项目要实现以下目标:
- 能够进行玩家与玩家的亚马逊棋对战,棋局的规则见附录一。
- 能够进行按键输入,并使VGA显示器受状态机控制完成“待机——游戏——结束”的三个场景的自动切换。
- 能够在棋局游戏中完成落子提示。系统不接受犯规和禁手落子。
- 能够进行玩家和环境的对战,并且实现中等智能的AI。
通过以下手段,我们实现了以上目标。
-
实现了六个大型模块的互联。
-
设计了一个Moore状态机,它在按键输入下控制VGA显示模块的输出和其它各游戏模块的进程。
-
设计了一个有内部状态存储的状态机,可以对单步按键输入快速响应,改变棋局状态并计算出下一步可落子区域。
-
设计了一个栈结构状态机,能利用寄存器实现搜索算法,以此实现AI下棋。
在本项目的设计过程中,有以下的设计亮点:
-
实现了VGA显示输出,尤其是探索出编码、存储、输出图片的方案。
-
模仿红白机的图像处理方式,优化了存储和显示,节约了计算资源。
-
利用辅助棋盘确定可落子区域,提高了鲁棒性,并简化了棋局逻辑设计,使得可以在单步之内演算出棋盘变化。
-
采用时序逻辑与组合逻辑相结合的方式设计单步游戏过程,对硬件资源利用率高。
-
由寄存器实现了栈结构状态机,可用于执行棋盘上的多层搜索与回溯算法,使AI实现成为可能。
-
仅靠五个按键就能实现高效输入,操作简单,屏幕有可行区域显示,玩家体验良好。

以上是本项目的顶层设计图。本项目将模块分为:主控部分Sys_ctrl、显示部分VGA_Multi、按钮检测Btn_dct、单步Single_Step、人工智能AI和分频器Timer。由于每个模块在下面的介绍中都涉及了时钟频率,本文略去分频器Timer具体介绍(代码见附录十一)。
以下模块的源代码见本文附录。
module VGA_Multi(
input wire [1:0] cmd, input wire [1:0] inf, //控制信号
input clk, //时钟信号
input rst, //复位信号
input wire [3:0] data_io, //棋面信号
output reg [3:0] r, output reg [3:0] g, output reg [3:0] b, //RGB信号
output reg [2:0] x,output reg [2:0] y, //坐标信号
output hs, output vs //扫描信号
); 输入:cmd是状态机传递的,控制场景切换;inf是状态机传递的,控制数字高亮;rst是外界输入的显示复位信号;data_io是单步模块传递的,指示某坐标处棋子的类型;clk是待分频的系统时钟。
输出:hs和vs分别是传递给VGA显示器的行扫描和场扫描同步信号,指示当前的扫描位置;r、g、b是传递给显示器的,控制该扫描点的颜色;x和y是传递给单步模块的坐标,索取当前坐标棋子的类型。
代码见附录三。
1. 此模块与单步模块相联。需要读取扫描的同时显示输出。
2. 此模块显示点阵字符,通过文献[1]和[2]中的方式实现。点阵字符发生器见工程文件附件。
3. 此模块显示大量图像信息,调用`Basys3`的储存块作显存。
4. 此模块储存并读取`.coe`图片文件,通过`IP`核生成`Single-port ROM`完成。其中`.coe`图片文件由Matlab转换`.jpg`图片文件生成。

-
VGA的扫描显示
VGA采用逐行扫描。行与行、场与场之间存在消隐以及显示周期,其显示的时序图如下。

行扫描可分为四个阶段:同步、消隐后肩、显示、消隐前肩,其到下个周期同步为一个显示循环,对应的是屏幕上的一行,每次扫描的电平时序由上图示出。场同步类似,对应为屏幕显示的一帧。不同的VGA格式有不同的参数,具体如下表。
表4.1 VGA显示模式参数表
本项目中,显示选用了基本的640X480@60格式,以适配各种显示环境。
-
VGA字符显示
字符显示的方式是将其转换为像素点,因此需要字符点阵。

在显示时,只需要将对应像素点的明暗读取出来,并将颜色送给RGB接口即可。字符生成的工作参考了了下附文献[1]及文献[2]的实现方式。
- 棋盘信息读取与显示
这是VGA显示最关键的一部分。为了将Single_Step模块中的棋面信息解码成图像信息。此处采用了逐步读取,逐步显示的时序,如下图示。

当扫描像素进入棋盘区域时,计数器开始计数。此处进行了如下优化:为避免除法运算的资源消耗,每个棋盘格的灰度在编码时采用了逐位互反码,当像素间隔超过定义的宽度时计数器上跳,对当前灰度进行取反即可得到下一格灰度,并将计数器的x和y信息送出Single_Step模块,由于VGA的时钟较Single_Step时钟慢,差时内VGA_Multi模块将装填好此格的棋面信息(哪种棋子、颜色等)。这就完成了棋盘的实时更新。这种显示模式仿照了红白机的电视显示模式。
-
图片显示
为了增强视觉冲击感,本项目中显示了三张图片。
为了将图片显示出来,需要将其转化为
RGB数据存储。具体的实现方法是:- 获得一张图片。
- 将
8X8X8的RGB信息重新编码为兼容Basys3开发板的4X4X4的RGB信息,格式是先行扫描再场扫描,与VGA的显示相兼容。 - 将编码成功的
RGB信息从.jpg图片文件存入.coe图片文件。 - 使用
IP核生成对应的Single-port ROM。 - 在显示时用上一部分所述方法(仍应注意时钟优化问题)获得对应像素的
4X4X4的RGB信息。
以上步骤的1、2、3使用Matlab完成,代码见附录二。
- 通过Matlab转换并调用
IP核的方式,实现了图片的显示,极大优化了显示质量。 - 充分利用存储器资源,调动46(/50)只
Block RAM,完成了数据吞吐。 - 优化了图形计算。逐位互反的编码和计数器结合,避免了除法运算,节约了存储空间。
- 高鲁棒性,每步落子均有可行性提示,在不可行位置落子系统不接纳(具体实现在模块
Single_Step)。 - 完成了在读取扫描的同时显示输出的时序。
module Sys_ctrl(
input clk, //时钟信号
input btn_up, input btn_down, input btn_enter, //按钮信号
input hang, //
input [1:0] game_over, //游戏结束信号
output reg [1:0] cmd, output reg [1:0] inf, //显示信号
output reg rst, //重置信号
output reg [1:0] p_num //玩家信号
); 输入:btn是外界输入的按键选择信号;rst是外界输入的显示复位信号;game_over是单步模块传递的,指示游戏结束的信号;clk是系统时钟。
输出:cmd和inf分别是传递给VGA显示器的场景切换和字符高亮控制;rst是传递给显示器的重置信号;p_num是传递给单步模块的对局信号。
代码见附录四。
1. 此模块是一个传统状态机,接受消抖后的按键输入,完成场景转换,数据统筹控制等工作。
2. 考虑到选择的实时性,模块必须采用同步。

以下是文字描述的状态转移图。

Moore状态机的设计、编码因循旧贯,未求奇功。值得指出的是,它必须与Single_Step处在同步时钟上,保证game_over信号能够顺利收发。
-
完成了七个状态的编码、转换和输出。
-
进行了同步设计,保证和
Single_Step的通信。
module button_detect(
input [4:0] bt,
input work0,
input work1,
output [2:0] od,
output ena,
output [2:0] bto,
input clk
);
parameter [2:0] NULL = 3'b000,
UP = 3'b001,
DOWN = 3'b010,
LEFT = 3'b011,
RIGHT = 3'b100,
ENTER = 3'b101; 输入:clk为系统时钟;work0为单步游戏模块所给出的使能信号;work1为100Hz的使能脉冲;bt为Basys3开发板上五个按键的输入信号。
输出:od为输出指令信息;ena为输出激活脉冲,当按键模块产生有效输出时才会输出脉冲;bto为适配主控模块的按键输出。
指令编码如代码所示,将检测后的按键信息分别编码为UP、DOWN、LEFT、RIGHT、ENTER,分别代表五个按键,此外还有空状态NULL表示没有按键按下或按键冲突的情况。
- 通过移位寄存器及组合逻辑判断实现按键消抖。
- 通过编码解决状态的表示和指令输出。

该部分工作的时序如下:

按键作为一个有机械结构的信号输入单元,其输入信号可能存在一定的抖动与毛刺,如果不进行检测,则很有可能在按下时连续产生很多个输出。但这种抖动可能较为尖锐,持续时间较短,于是可以利用一个频率相对于抖动的特征频率较低的寄存检测模块来消除抖动,从而实现按键信号的正确输出。
按键检测模块有三个寄存器,记录到当前时间为止连续三个采样点的按键按下状态。当检测到第一个状态为NULL且后两个状态相同时,将会产生有效指令输出。
- 通过按键指令编码实现了整体系统中的编码统一,对游戏模块与按键输入模块、
AI模块的互联提供了帮助。 - 通过寄存器完成了按键消抖,使得人机交互体验舒适。
module single_step(
input wk1,
input wk0,
input rst,
input [2:0] od1,
input [2:0] od0,
output ena1,
output ena0,
input [2:0] g_x,
input [2:0] g_y,
input clk,
input [1:0] mode,
output reg [3:0] g_io,
output [1:0] game_over,
output [63:0] bd,
output [63:0] tp,
output [1:0] st,
output [2:0] p_x,
output [2:0] p_y
);
parameter [2:0] NULL = 3'b000,
UP = 3'b001,
DOWN = 3'b010,
LEFT = 3'b011,
RIGHT = 3'b100,
ENTER = 3'b101; 输入:clk为时钟信号;wk1,wk0分别是AI输入和按键的输入激活脉冲;od1,od0分别是AI和按键输入的指令,指令格式及含义如常数定义中所示;rst是棋盘重置信号;g_x,g_y是VGA的查询地址;mode是当前模式选择,人人对战时为00,人机对战时为10。
输出:ena1,ena0分别是给AI和按键输入的工作使能信号;g_io是对VGA的棋盘信息输出;game_over为判断棋局结束逻辑,两位分别代表棋局的结束情况及获胜玩家;bd为占位棋盘输出;tp为提示棋盘输出;st为当前所处阶段;p_x,p_y分别为光标所处位置的行列坐标。
代码见附录六。
- 此模块为一个三状态且有内部存储状态的状态机,需要考虑状态转换的条件,选择合适的状态表示方法。
- 对棋盘的表示需要采取简单方法,包含关于棋盘上棋子位置、所属方的全部信息。
- 需要由复杂的符合逻辑完成落子可行性的分析。


当rst信号为1时,整个系统将被置为初态,此时棋盘上有且仅有位于原位的分别属于红蓝两方的八个棋子,没有箭的存在。
当rst信号为0时,系统正常工作。系统会根据输入的mode以及当前的player选择ena信号的输出用来激活对应的机器人或者按键检测系统,而后从对应的系统中接受指令。
根据游戏规则,每一次玩家的行动包括三步,因此每次玩家的行动也是由状态机的三个状态完成。完成一次三状态的过程后玩家将会切换。棋盘会由玩家输入信息改变并被记录,对键盘的检测包括方向和确定键,方向键能控制光标在棋盘上的移动,并且逻辑判断使其不会超过棋盘边界,确定表示在此处的落子尝试。
为了简化程序步骤,除了占位棋盘brd和位置标记chs以外,引入了一个辅助提示棋盘tip。tip棋盘由组合逻辑给出,能够根据当前所处的step阶段生成一个当前步允许落子的合法位置。如此一来按下确定键是只需判断是否在tip棋盘有标记即可。
最后利用组合逻辑完成从brd、chs、tip的信息向显示编码gph的转换,并通过接口与VGA显示模块相连完成显示工作。
- 完成了基于单步触发涉及的棋盘状态转移逻辑。
- 利用
tip辅助棋盘完成了对可行位置的简单判断,并且能显示为画面上的提示优化玩家体验。 - 对棋盘信息进行了编码便于与VGA模块交互输出。
AI模块包含三个下属模块,在此仅陈述其对外接口:
module ai_top(
input CLK,
input p_100hz,
input p_10khz,
input p_5hz,
input WORK,
input [63:0] BRD,
input [63:0] TIP,
input [1:0] STEP,
input [2:0] PX,
input [2:0] PY,
output [2:0] OD,
output WRITE
); 输入:CLK为系统时钟;p_100hz,p_10khz,p_5hz分别为ai_ctrl,ai_calc,ai_play所使用频率的使能脉冲信号;WORK为系统输入的AI开始工作信号;BRD为占位棋盘信息;TIP为提示棋盘信息;STEP为当前所处步;PX,PY分别为当前光标所处位置。
输出:OD为AI计算完成后的指令输出,其编码方式与button_detect,single_step相同;WRITE为输出提示信号,当有指令输出时为1。
代码见附录七、八、九、十。
- 设计一个AI控制状态机,完成等待、载入、计算及输出四个工作模式的切换。
- 利用附加存储的状态机实现栈结构寄存器,并在此基础上有回溯功能的搜索算法。
- 利用组合逻辑进行输出。

1.状态控制ai_ctrl
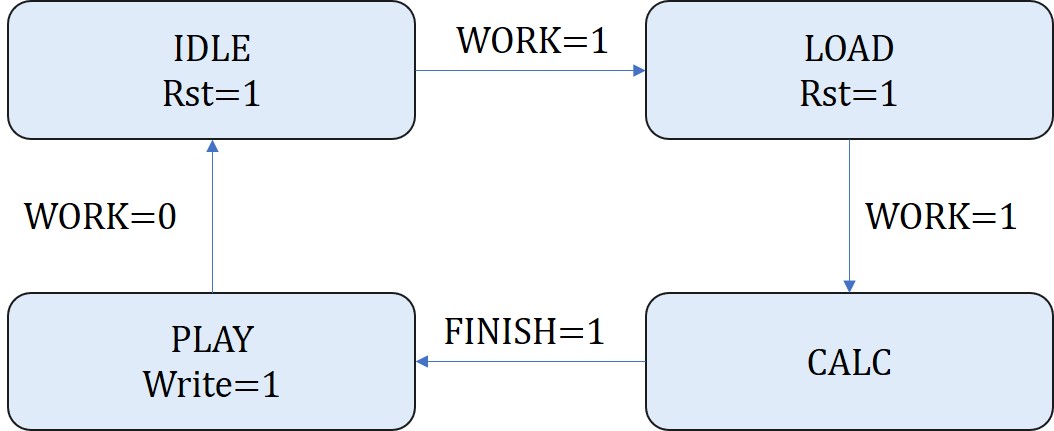
AI状态控制模块包含四个状态:等待、载入、计算和输出。等待状态接到系统的工作使能信号后开始转换到载入状态,经过一拍的载入过程后在ai_calc模块中开始进行计算。完成计算得到结果后,再通过ai_play模块进行输出,输出完成后回到等待。
2.搜索模块ai_calc
搜索模块的核心部分是搜索算法的实现,在这里采用了状态机和若干用以记录栈信息的寄存器。
由一个step状态记录当前的搜索层数,当进行到目标位置时便通过一个估值组合逻辑生成分数score,并与先前最优解比较,如果更优则将记录的每步选择替换最优解。

搜索时每次将step层的位置pos[step]加一,倘若处于可行区域,那么落子更新状态并将step+1,进行下一层的搜索;否则什么都不做,继续+1,直到找到可行位置。当pos变为64时停止当前层的搜索,回溯到上一层,当第一层的pos变为64时即表示搜索工作已全部完成。
估值函数使用组合逻辑实验,基本上是对当前局面下可直接到达的位置的估计。
3.落子模块ai_play
落子模块使用组合逻辑完成,每隔0.2s输出一个指令,以此来模仿人类玩家手动输入的时间间隔。
指令输出直接将当前棋盘光标位置PX和PY与目标位置的坐标比较,生成上下左右的指令。当到达目标位置时输出ENTER,即可表示按下,完成一次落子。
- 使用状态机控制AI的运行过程,并充分考虑了传输线时间设计了载入状态。
- 利用状态机模型与一定的寄存器实现了栈结构与搜索算法,可求得一定意义上的最优解。
- 简单高效地实现了落子过程,并且一定程度上模仿了人类玩家行为。
顶层模块线连第三部分的各接口,具体代码见附录十二。
[1] Verilog实现VGA字符显示 https://blog.csdn.net/iteye_5971/article/details/82611766
[2] FPGA中级项目——VGA显示模块 https://www.eetree.cn/wiki/fpga_project_medium
亚马逊棋背景(引百度词条:亚马逊棋)
亚马逊棋(Game of the Amazons),由阿根廷人WalteZamkauska在1988年推出的两人棋类,是奥林匹亚电脑游戏程式竞赛的比赛指定棋类,由国际象棋中后的走法衍生而来,属于两人零和完备信息博弈。由于局面过于复杂,仅第一步就有2176种走法,故该棋类多不用于人类之间比赛,而是用于计算机博弈相关方面的比赛与研究 。
亚马逊棋的研究,实现包括了编程语言,算法思想,博弈思想等;常用的算法有蒙特卡洛算法,退火算法,遗传算法的等;随着机器学习的开展,亚马逊棋作为计算机博弈的一个项目正逐渐的被更广泛的熟知。
目前亚马逊棋是ICGA国际机器博弈锦标赛和全国大学生计算机博弈大赛的比赛项目之一。
亚马逊棋规则(引维基词条:亚马逊棋规则)
- 在8*8的棋盘上,每方有四个棋子(四个Amazons);
- 每个棋子都相当于国际象棋中的皇后,它们的行棋方法与皇后相同,可以在八个方向(上、下、左、右、左上、左下、右上、右下)上任意行走,但不能穿过阻碍;
- 当轮到一方行棋时,此方只能而且必须移动四个Amazons中的一个,并在移动完成后,由当前移动的棋子释放一个障碍,障碍的释放方法与棋子的移动方法相同(皇后的走法,不能穿过障碍),同样障碍的放置也是必须的;
- 当某方完成某次移动后,对方四个棋子均不能再移动时,对方将输掉比赛;
- 每次开局位于棋盘下方的玩家先手;
- 整个比赛中双方均不能吃掉对方或己方的棋子或障碍。
image = imread('Picture_name');
file = fopen('Coe_name', 'w');
%Transformation
R = image(:,:,1);
R = floor(double(R) / 16);
G = image(:,:,2);
G = floor(double(G) / 16);
B = image(:,:,3);
B = floor(double(B) / 16);
[ROW,COL,COLOR] = size(image);
%Writing
fprintf(file,'MEMORY_INITIALIZATION_RADIX=2;\nMEMORY_INITIALIZATION_VECTOR=\n');
for row = 1:ROW
for col = 1:COL
fprintf(file,dec2bin(R(row,col),4));
fprintf(file,dec2bin(G(row,col),4));
fprintf(file,dec2bin(B(row,col),4));
if row == ROW && col == COL
fprintf(file,';\n');
else
fprintf(file,',\n');
end
end
end
fclose(file);
newIm(:,:,1) = R;
newIm(:,:,2) = G;
newIm(:,:,3) = B;
imshow(newIm);module VGA_Multi(
//控制信号
input wire [1:0] cmd,
input wire [1:0] inf,
//时钟信号
input clk,
//复位信号
input rst,
//棋面信号
input wire [3:0] data_io,
//RGB信号
output reg [3:0] r,
output reg [3:0] g,
output reg [3:0] b,
//坐标信号
output reg [2:0] x,
output reg [2:0] y,
//扫描信号
output hs,
output vs
);
//边界
parameter UP_BOUND = 31;
parameter DOWN_BOUND = 510;
parameter LEFT_BOUND = 144;
parameter RIGHT_BOUND = 783;
//结束
parameter left_q = 363;//左边界
parameter up_q = 170;//上边界
parameter right_q = 564;//右边界
parameter down_q = 371;//下边界
parameter col_q = 200;
parameter left_a = 215;//左边界
parameter up_a = 100;//上边界
parameter right_a = 714;//右边界
parameter down_a = 203;//下边界
parameter col = 498;
parameter up_pos_u = 267;
parameter down_pos_u = 274;
parameter left_pos_u = 457;
parameter right_pos_u = 512;
parameter up_pos_l = 280;
parameter down_pos_l =287;
parameter left_pos_l = 457;
parameter right_pos_l = 470;
parameter d = 30;//方格宽度
parameter l = 15;//方格中心
parameter left_ud = 304;//左边界
parameter up_sk = 151;//上边界
parameter right_ud = 542;//右边界
parameter down_sk = 390;//下边界
parameter [1:0] u_l = 2'b01, d_l = 2'b10;
wire pclk;//25MHz
reg [1:0] count;
reg [9:0] hcount, vcount;
reg [15:0] addr = 0;
wire [11:0] data;
wire [11:0] datab;
wire [11:0] datar;
reg [9:0] last_line_x;//上一个跨过的横向边界位置
reg [9:0] last_line_y;//上一个跨过的纵向边界位置
reg [3:0] last_f;//上一个灰度
integer i;
integer j;
reg [3:0] chs;
reg [1:0] pic;
reg [1:0] Board [509:0];
parameter [3:0] red_o = 4'b0001, yel_o = 4'b0101, red_g = 4'b1001, yel_g = 4'b1101, blue_o = 4'b0010,
cyan_o = 4'b0110, blue_g = 4'b1010, cyan_g = 4'b1110, black_o = 4'b0011, gray_o = 4'b0111, black_g = 4'b1011,
gray_g = 4'b1111, p_o = 4'b0100, tip_o = 4'b1000, p_g = 4'b1100;
parameter [3:0] tip_red = 4'b0111, tip_green = 4'b1111, tip_blue = 4'b0111;
rom_amazons UA(.clka(pclk),.addra(addr), .douta(data));
rom_blue UB(.clka(pclk),.addra(addr), .douta(datab));
rom_red UR(.clka(pclk),.addra(addr), .douta(datar));
wire [7:0] p_1 [55:0];
wire [7:0] p_2 [13:0];
wire rd;
reg [59:0] data_cmd;
wire [59:0] data_line;
assign data_line = data_cmd;
RAM_set u_ram_1 (.clk(clk),.data(data_line[5:0]),.col0(p_1[0]),.col1(p_1[1]),.col2(p_1[2]),.col3(p_1[3]),.col4(p_1[4]),.col5(p_1[5]),.col6(p_1[6]));
RAM_set u_ram_2 (.clk(clk),.data(data_line[11:6]),.col0(p_1[7]),.col1(p_1[8]),.col2(p_1[9]),.col3(p_1[10]),.col4(p_1[11]),.col5(p_1[12]),.col6(p_1[13]));
RAM_set u_ram_3 (.clk(clk),.data(data_line[17:12]),.col0(p_1[14]),.col1(p_1[15]),.col2(p_1[16]),.col3(p_1[17]),.col4(p_1[18]),.col5(p_1[19]),.col6(p_1[20]));
RAM_set u_ram_4 (.clk(clk),.data(data_line[23:18]),.col0(p_1[21]),.col1(p_1[22]),.col2(p_1[23]),.col3(p_1[24]),.col4(p_1[25]),.col5(p_1[26]),.col6(p_1[27]));
RAM_set u_ram_5 (.clk(clk),.data(data_line[29:24]),.col0(p_1[28]),.col1(p_1[29]),.col2(p_1[30]),.col3(p_1[31]),.col4(p_1[32]),.col5(p_1[33]),.col6(p_1[34]));
RAM_set u_ram_6 (.clk(clk),.data(data_line[35:30]),.col0(p_1[35]),.col1(p_1[36]),.col2(p_1[37]),.col3(p_1[38]),.col4(p_1[39]),.col5(p_1[40]),.col6(p_1[41]));
RAM_set u_ram_7 (.clk(clk),.data(data_line[41:36]),.col0(p_1[42]),.col1(p_1[43]),.col2(p_1[44]),.col3(p_1[45]),.col4(p_1[46]),.col5(p_1[47]),.col6(p_1[48]));
RAM_set u_ram_8 (.clk(clk),.data(data_line[47:42]),.col0(p_1[49]),.col1(p_1[50]),.col2(p_1[51]),.col3(p_1[52]),.col4(p_1[53]),.col5(p_1[54]),.col6(p_1[55]));
RAM_set u_ram_9 (.clk(clk),.data(data_line[53:48]),.col0(p_2[0]),.col1(p_2[1]),.col2(p_2[2]),.col3(p_2[3]),.col4(p_2[4]),.col5(p_2[5]),.col6(p_2[6]));
RAM_set u_ram_10 (.clk(clk),.data(data_line[59:54]),.col0(p_2[7]),.col1(p_2[8]),.col2(p_2[9]),.col3(p_2[10]),.col4(p_2[11]),.col5(p_2[12]),.col6(p_2[13]));
assign pclk = count[1];
always @ (posedge clk or posedge rst)
begin
if (rst) count <= 0;
else count <= count+1;
end
assign hs = (hcount < 96) ? 0 : 1;
always @ (posedge pclk or posedge rst)
begin
if (rst) hcount <= 0;
else if (hcount == 799) hcount <= 0;
else hcount <= hcount+1;
end
assign vs = (vcount < 2) ? 0 : 1;
always @ (posedge pclk or posedge rst)
begin
if (rst) vcount <= 0;
else if (hcount == 799)
begin
if (vcount == 520) vcount <= 0;
else vcount <= vcount+1;
end
else vcount <= vcount;
end
always @ (posedge pclk)
begin//1
if(cmd == 2'b00)//Page_1
begin//2.1
data_cmd <= 60'b010010_001010_111110_111110_011011_001110_100010_001010_010101_011001;
if (vcount>=up_pos_u && vcount<=down_pos_u && hcount>=left_pos_u && hcount<=right_pos_u)
begin//3.1
if (p_1[hcount-left_pos_u][vcount-up_pos_u])
begin//4.1
r <= 4'b1000 + ((inf == u_l) ? 4'b0111 : 4'b0000);
g <= 4'b1000 + ((inf == u_l) ? 4'b0111 : 4'b0000);
b <= 4'b1000 + ((inf == u_l) ? 4'b0111 : 4'b0000);
end//4.1
else
begin//4.2
r <= 4'b0000;
g <= 4'b0000;
b <= 4'b0000;
end//4.2
end//3.1
else if(vcount>=up_pos_l && vcount<=down_pos_l && hcount>=left_pos_l && hcount<=right_pos_l)
begin//3.2
if (p_2[hcount-left_pos_l][vcount-up_pos_l])
begin//4.1
r = 4'b1000 + ((inf == d_l) ? 4'b0111 : 4'b0000);
g <= 4'b1000 + ((inf == d_l) ? 4'b0111 : 4'b0000);
b <= 4'b1000 + ((inf == d_l) ? 4'b0111 : 4'b0000);
end//4.1
else
begin//4.2
r <= 4'b0000;
g <= 4'b0000;
b <= 4'b0000;
end//4.2
end//3.2
else if(hcount > left_a && hcount < right_a && vcount > up_a && vcount < down_a)
begin//3.3
addr <= (vcount - up_a - 1) * col + (hcount - left_a) - 1;
r <= data[11:8];
g <= data[7:4];
b <= data[3:0];
end//3.3
else
begin//3.4
r <= 4'b0000;
g <= 4'b0000;
b <= 4'b0000;
end//3.4
end//2.1
else if(cmd == 2'b10)
begin//2.2
if(hcount > left_q && hcount < right_q && vcount > up_q && vcount < down_q)
begin//3.1
addr <= (vcount - up_q - 1) * col_q + (hcount - left_q) - 1;
r <= datab[11:8];
g <= datab[7:4];
b <= datab[3:0];
end//3.1
else
begin//3.2
r <= 4'b0000;
g <= 4'b0000;
b <= 4'b0000;
end//3.2
end//2.2
else if(cmd == 2'b01)
begin//2.3
if(hcount > left_q && hcount < right_q && vcount > up_q && vcount < down_q)
begin//3.1
addr <= (vcount - up_q - 1) * col_q + (hcount - left_q) - 1;
r <= datar[11:8];
g <= datar[7:4];
b <= datar[3:0];
end//3.1
else
begin//3.2
r <= 4'b0000;
g <= 4'b0000;
b <= 4'b0000;
end//3.2
end//2.3
else
begin//2.4
if( hcount < left_ud | hcount > right_ud | vcount < up_sk | vcount > down_sk )
begin//3.1
r <= 0;
g <= 0;
b <= 0;
end//3.1
else
begin//3.2
if ( (hcount == left_ud) && (vcount == up_sk) )//左上角
begin//4.1
last_line_x = left_ud;
last_line_y = up_sk;
last_f <= 4'b1001;
r <= 4'b1001;
g <= 4'b1001;
b <= 4'b1001;
x = 0;
y = 0;
end//4.1
else if(hcount == right_ud)//右边界
begin//4.2
last_line_x = left_ud;
last_f = ~last_f;
r <= 4'b0000;
g <= 4'b0000;
b <= 4'b0000;
x = x;
y = 0;
end//4.2
else if(vcount == down_sk)//下边界
begin//4.3
last_f = ~last_f;
last_line_y = up_sk;
r <= 4'b0000;
g <= 4'b0000;
b <= 4'b0000;
x = 0;
y = y;
end//4.3
else//内部
begin//4.4
if((hcount < last_line_x + d) && (vcount < last_line_y + d))//一个方格
begin//5.1
x = x;
y = y;
chs = data_io;
case(chs)//6
red_o://红子
begin//6.1
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 100)
begin
r <= 4'b1111;
g <= 4'b0000;
b <= 4'b0000;
end
else
begin
r <= last_f;
g <= last_f;
b <= last_f;
end
end//6.1
blue_o://蓝子
begin//6.2
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 100)
begin
r <= 4'b0000;
g <= 4'b0000;
b <= 4'b1111;
end
else
begin
r <= last_f;
g <= last_f;
b <= last_f;
end
end//6.2
black_o://箭
begin//6.3
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 100)
begin
r <= 4'b0000;
g <= 4'b0000;
b <= 4'b0000;
end
else
begin
r <= last_f;
g <= last_f;
b <= last_f;
end
end//6.3
yel_o://红加光标
begin//6.4
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 100)
begin
r <= 4'b1111;
g <= 4'b1111;
b <= 4'b0000;
end
else
begin
r <= last_f;
g <= last_f;
b <= last_f;
end
end//6.4
cyan_o://蓝加光标
begin//6.5
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 100)
begin
r <= 4'b0000;
g <= 4'b1111;
b <= 4'b1111;
end
else
begin
r <= last_f;
g <= last_f;
b <= last_f;
end
end//6.5
gray_o://箭加光标
begin//6.6
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 100)
begin
r <= 4'b1110;
g <= 4'b1110;
b <= 4'b1110;
end
else
begin
r <= last_f;
g <= last_f;
b <= last_f;
end
end//6.6
p_o://空格加光标
begin//6.7
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 25)
begin
r <= 4'b1111;
g <= 4'b1111;
b <= 4'b1111;
end
else
begin
r <= last_f;
g <= last_f;
b <= last_f;
end
end//6.7
red_g://红加提示
begin//6.8
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 100)
begin
r <= 4'b1111;
g <= 4'b0000;
b <= 4'b0000;
end
else
begin
r <= tip_red;
g <= tip_green;
b <= tip_blue;
end
end//6.8
blue_g://蓝加提示
begin//6.9
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 100)
begin
r <= 4'b0000;
g <= 4'b0000;
b <= 4'b1111;
end
else
begin
r <= tip_red;
g <= tip_green;
b <= tip_blue;
end
end//6.9
black_g://箭加提示
begin//6.10
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 100)
begin
r <= 4'b0000;
g <= 4'b0000;
b <= 4'b0000;
end
else
begin
r <= tip_red;
g <= tip_green;
b <= tip_blue;
end
end//6.10
yel_g://黄加提示
begin//6.11
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 100)
begin
r <= 4'b1111;
g <= 4'b1111;
b <= 4'b0000;
end
else
begin
r <= tip_red;
g <= tip_green;
b <= tip_blue;
end
end//6.11
cyan_g://青加提示
begin//6.12
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 100)
begin
r <= 4'b0000;
g <= 4'b1111;
b <= 4'b1111;
end
else
begin
r <= tip_red;
g <= tip_green;
b <= tip_blue;
end
end//6.12
gray_g://箭加提示
begin//6.13
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 100)
begin
r <= 4'b1110;
g <= 4'b1110;
b <= 4'b1110;
end
else
begin
r <= tip_red;
g <= tip_green;
b <= tip_blue;
end
end//6.13
tip_o://提示
begin//6.14
begin
r <= tip_red;
g <= tip_green;
b <= tip_blue;
end
end//6.14
p_g://光标加提示
begin//6.15
if((hcount - last_line_x - l)**2 + (vcount - last_line_y - l)**2 < 25)
begin
r <= 4'b1111;
g <= 4'b1111;
b <= 4'b1111;
end
else
begin
r <= tip_red;
g <= tip_green;
b <= tip_blue;
end
end//6.15
default://空
begin//6.16
r <= last_f;
g <= last_f;
b <= last_f;
end//6.16
endcase//6
end//5.1
else if((hcount >= last_line_x + d) && (vcount < last_line_y + d))//跨过横向
begin//5.2
last_line_x <= last_line_x + d;
last_f <= ~last_f;
r <= last_f;
g <= last_f;
x = x;
y = y + 1;
end//5.2
else if((hcount < last_line_x + d) && (vcount >= last_line_y + d))//跨过纵向
begin//5.3
last_line_y <= last_line_y + d;
last_f <= ~last_f;
r <= last_f;
g <= last_f;
b <= last_f;
x = x + 1;
y = y;
end//5.3
else
begin//5.4
r <= 4'b1111;
g <= 4'b1111;
b <= 4'b1111;
x = x;
y = y;
end//5.4
end//4.4
end//3.2
end//2.4
end//1
endmodulemodule Sys_ctrl(
input clk,
input btn_up,
input btn_down,
input btn_enter,
input hang,
input [1:0] game_over,
output reg [1:0] cmd,
output reg [1:0] inf,
output reg rst,
output reg [1:0] p_num
);
reg [2:0] pstate = 3'b000;
reg [2:0] nstate = 3'b000;
parameter [2:0] idle = 3'b000, player_s = 3'b001, ai_s = 3'b100, player = 3'b011, ai = 3'b110,
p_hang = 3'b111, blue_win = 3'b010, red_win = 3'b101;
parameter [1:0] r_w = 2'b01, b_w = 2'b10, chs = 2'b11, scrn = 2'b00;
parameter [1:0] u_l = 2'b01, d_l = 2'b10;
parameter [1:0] p2p = 2'b00, p2a = 2'b10, a2a = 2'b11;
always@(posedge clk) pstate <= nstate;
always@(btn_up, btn_down, btn_enter, hang, pstate, game_over)
begin
case(pstate)
idle: if(btn_up == 1) nstate <= player_s;
else if(btn_down == 1) nstate <= ai_s;
else if(btn_enter == 1) nstate <= player_s;
else nstate <= idle;
player_s: if(btn_enter == 1) nstate <= player;
else if(btn_down == 1) nstate <= ai_s;
else nstate <= player_s;
ai_s: if(btn_enter == 1) nstate <= ai;
else if(btn_up == 1) nstate <= player_s;
else nstate <= ai_s;
player: if(game_over == 2'b10) nstate <= red_win;
else if(game_over == 2'b11) nstate <= blue_win;
else if(hang == 1) nstate <= p_hang;
else nstate <= player;
ai: if(game_over == 2'b10) nstate <= red_win;
else if(game_over == 2'b11) nstate <= blue_win;
else nstate <= ai;
p_hang: if(hang == 0) nstate <= player;
else if(game_over == 2'b10) nstate <= red_win;
else if(game_over == 2'b11) nstate <= blue_win;
else nstate <= p_hang;
blue_win: if(btn_down == 1|| btn_enter == 1 || btn_up == 1) nstate <= idle;
else nstate <= blue_win;
red_win: if(btn_down == 1|| btn_enter == 1 || btn_up == 1) nstate <= idle;
else nstate <= red_win;
default: nstate <= idle;
endcase
end
always@(pstate)
begin
case(pstate)
idle: begin cmd <= scrn; rst <= 1; inf <= u_l; p_num <= p2p; end
player_s: begin cmd <= scrn; rst <= 1; inf <= u_l;p_num <= p2p; end
ai_s: begin cmd <= scrn; rst <= 1; inf <= d_l; p_num <= p2p; end
player: begin cmd <= chs; rst <= 0; inf <= 2'b00; p_num <= p2p; end
ai: begin cmd <= chs; rst <= 0; inf <= 2'b00; p_num <= p2a; end
p_hang: begin cmd <= chs; rst <= 0; inf <= 2'b00;p_num <= a2a; end
blue_win: begin cmd <= b_w; rst <= 0; inf <= u_l; p_num <= p2p; end
red_win: begin cmd <= r_w; rst <= 0; inf <= u_l; p_num <= p2p; end
default: begin cmd <= scrn; rst <= 0; inf <= u_l; p_num <= p2p; end
endcase
end
endmodulemodule button_detect(
input [4:0] bt,
input work0,
input work1,
output [2:0] od,
output ena,
output [2:0] bto,
input clk
);
reg [2:0] pre, last, now;
parameter [2:0] NULL = 3'b000,
UP = 3'b001,
DOWN = 3'b010,
LEFT = 3'b011,
RIGHT = 3'b100,
ENTER = 3'b101;
always @(posedge clk) if (work1) begin
pre <= last;
last <= now;
case (bt)
5'b00001: now <= ENTER; //bt[0]
5'b00010: now <= UP; //bt[1]
5'b00100: now <= DOWN; //bt[2]
5'b01000: now <= LEFT; //bt[3]
5'b10000: now <= RIGHT; //bt[4]
default: now <= NULL;
endcase
end
assign ena = work0 && work1 && ((now == last) && (pre == NULL));
assign od = ena * now;
assign bto = {3{ena}} & bt[2:0];
endmodule
module single_step(
input wk1,
input wk0,
input rst,
input [2:0] od1,
input [2:0] od0,
output ena1,
output ena0,
input [2:0] g_x,
input [2:0] g_y,
input clk,
input [1:0] mode,
output reg [3:0] g_io,
output [1:0] game_over,
output [63:0] bd,
output [63:0] tp,
output [1:0] st,
output [2:0] p_x,
output [2:0] p_y
);
reg [63:0] brd;
reg [63:0] tip;
reg [1:0] step;
reg [2:0] px;
reg [2:0] py;
reg over;
assign bd = brd;
assign tp = tip;
assign st = step;
assign p_x = px;
assign p_y = py;
reg [5:0] chs [7:0];
reg [2:0] sl, rx, ry;
reg [3:0] gph [63:0];
reg player;
wire [2:0] od;
wire ena;
parameter [15:0] dx = 16'b1010100100000001;
parameter [15:0] dy = 16'b0001101010010000;
parameter [2:0] NULL = 3'b000,
UP = 3'b001,
DOWN = 3'b010,
LEFT = 3'b011,
RIGHT = 3'b100,
ENTER = 3'b101;
integer i, j, k;
reg [3:0] cnt, x, y;
assign od = mode[player] ? od1 : od0;
assign ena1 = mode[player];
assign ena0 = !mode[player];
assign ena = mode[player] ? wk1 : wk0;
always @(posedge clk) begin
if (rst) begin
chs[0] <= 6'o02;
chs[1] <= 6'o20;
chs[2] <= 6'o50;
chs[3] <= 6'o72;
chs[4] <= 6'o05;
chs[5] <= 6'o27;
chs[6] <= 6'o57;
chs[7] <= 6'o75;
brd <= 64'h2400810000810024;
px <= 0;
py <= 0;
step <= 0;
player <= 0;
sl <= 0;
end
if (ena)
case (od)
UP : if (px != 0) px <= px - 1;
DOWN : if (px != 7) px <= px + 1;
LEFT : if (py != 0) py <= py - 1;
RIGHT : if (py != 7) py <= py + 1;
ENTER : if (tip[{px,py}]) begin
case (step)
2'b00: begin
for (i = 0; i < 8; i = i + 1) if (chs[i] == {px,py}) sl <= i;
step <= 2'b01;
rx <= px;
ry <= py;
px <= px;
py <= py;
player <= player;
brd <= brd;
end
2'b01: begin
brd[{px,py}] <= 1;
brd[chs[sl]] <= 0;
chs[sl] <= {px,py};
step <= 2'b10;
rx <= px;
ry <= py;
px <= px;
py <= py;
player <= player;
end
2'b10: begin
brd[{px,py}] <= 1;
step <= 2'b00;
player <= ~player;
rx <= px;
ry <= py;
px <= px;
py <= py;
end
default:step <= 2'b00;
endcase
end
else begin
brd <= brd;
px <= px;
py <= py;
end
default:brd <= brd;
endcase
end
always @(step) begin
tip = 0;
if (step[0] || step[1]) begin
for (j = 1; j < 17; j = j + 2) begin : part01
x = rx;
y = ry;
for (k = 0; k < 7; k = k + 1) begin
x = x + {dx[j],dx[j-1]} - 1;
y = y + {dy[j],dy[j-1]} - 1;
if ((x > 7) || (y > 7) || (brd[{x[2:0],y[2:0]}])) disable part01;
else tip[{x[2:0],y[2:0]}] = 1;
end
end
over = 0;
end
else begin
for (i = 0; i < 4; i = i + 1) begin
cnt = 0;
for (j = 1; j < 17; j = j + 2) begin
x = chs[{player,i[1:0]}][5:3] + {dx[j],dx[j-1]} - 1;
y = chs[{player,i[1:0]}][2:0] + {dy[j],dy[j-1]} - 1;
if ((x <= 7) && (y <= 7) && !brd[{x[2:0],y[2:0]}]) cnt = cnt + 1;
end
if (cnt != 0) tip[chs[{player,i[1:0]}]] = 1;
end
over = (tip == 0);
end
end
assign game_over[1] = over;
assign game_over[0] = !player;
always @(*) begin
for (i = 0; i < 64; i = i + 1) gph[i] = 4'b0011 * brd[i] | 4'b1000 * tip[i];
for (i = 0; i < 4; i = i + 1) gph[chs[i]][1] = 0;
for (i = 4; i < 8; i = i + 1) gph[chs[i]][0] = 0;
gph[{px,py}][2] = 1;
end
always @(*) begin
g_io = gph[{g_x,g_y}];
end
endmodulemodule ai_top(
input CLK,
input p_100hz,
input p_10khz,
input p_5hz,
input WORK,
input [63:0] BRD,
input [63:0] TIP,
input [1:0] STEP,
input [2:0] PX,
input [2:0] PY,
output [2:0] OD,
output WRITE
);
wire FINISH, RST, WR;
wire [17:0] POS;
assign WRITE = p_5hz && WR;
ai_ctrl A1(.clk(CLK),.ena(p_100hz),.work(WORK),.finish(FINISH),.rst(RST),.write(WR));
ai_calc A2(.clk(CLK),.ena(p_10khz),.set(RST),.brd(BRD),.tip(TIP),.finish(FINISH),.ans(POS));
ai_play A3(.clk(CLK),.ena(p_5hz),.write(WR),.play(POS),.px(PX),.py(PY),.step(STEP),.od(OD));
endmodulemodule ai_ctrl(
input clk,
input ena,
input work,
input finish,
output rst,
output write
);
parameter [1:0] IDLE = 2'b00,
LOAD = 2'b01,
CALC = 2'b10,
PLAY = 2'b11;
reg [1:0] state = IDLE;
always @(posedge clk)
case (state)
IDLE: if (work) state <= LOAD;
else state <= IDLE;
LOAD: if (work) state <= CALC;
else state <= LOAD;
CALC: if (finish) state <= PLAY;
else state <= CALC;
PLAY: if (!work) state <= IDLE;
else state <= PLAY;
default:state <= IDLE;
endcase
assign rst = (state == IDLE) || (state == LOAD);
assign write = (state == PLAY);
endmodulemodule ai_calc(
input clk,
input ena,
input set,
input [63:0] brd,
input [63:0] tip,
output finish,
output [17:0] ans
);
parameter [15:0] dx = 16'b1010100100000001;
parameter [15:0] dy = 16'b0001101010010000;
reg [63:0] bd [3:0];
reg [63:0] tp [2:0];
reg [6:0] pos [2:0];
reg [17:0] best;
reg [1:0] step;
reg [7:0] score;
reg [7:0] max;
integer i1, i2, i3, j1, j2, j3, k1, k2, k3;
reg [5:0] chs [3:0];
reg [3:0] x1, y1, x2, y2;
reg [1:0] cs;
assign ans = best;
always @(posedge clk) if (ena) begin
if (set) begin
bd[0] <= brd;
bd[1] <= 0;
bd[2] <= 0;
bd[3] <= 0;
tp[0] <= tip;
step <= 0;
pos[0] <= 0;
pos[1] <= 0;
pos[2] <= 0;
max <= 0;
best <= 18'o111111;
end
else case (step)
0: begin
if (pos[0] < 64) begin
if (tp[0][pos[0][5:0]]) begin
bd[1] <= bd[0];
pos[1] <= 0;
step <= 1;
pos[0] <= pos[0];
pos[2] <= pos[2];
bd[0] <= brd;
bd[2] <= bd[2];
bd[3] <= bd[3];
max <= max;
best <= best;
tp[0] <= tip;
end
else begin
step <= 0;
pos[0] <= pos[0] + 1;
pos[1] <= pos[1];
pos[2] <= pos[2];
bd[0] <= brd;
bd[1] <= bd[1];
bd[2] <= bd[2];
bd[3] <= bd[3];
max <= max;
best <= best;
tp[0] <= tip;
end
end
else begin
step <= 0;
pos[0] <= pos[0];
pos[1] <= pos[1];
pos[2] <= pos[2];
bd[0] <= brd;
bd[1] <= bd[1];
bd[2] <= bd[2];
bd[3] <= bd[3];
max <= max;
best <= best;
tp[0] <= tip;
end
end
1: begin
if (pos[1] >= 64) begin
pos[0] <= pos[0] + 1;
step <= 0;
pos[1] <= pos[1];
pos[2] <= pos[2];
bd[0] <= brd;
bd[1] <= bd[1];
bd[2] <= bd[2];
bd[3] <= bd[3];
max <= max;
best <= best;
tp[0] <= tip;
end
else if (tp[1][pos[1][5:0]]) begin
bd[2] <= bd[1] - (1 << pos[0][5:0]) + (1 << pos[1][5:0]);
pos[2] <= 0;
step <= 2;
pos[0] <= pos[0];
pos[1] <= pos[1];
bd[0] <= brd;
bd[1] <= bd[1];
bd[3] <= bd[3];
max <= max;
best <= best;
tp[0] <= tip;
end
else begin
pos[1] <= pos[1] + 1;
step <= 1;
pos[0] <= pos[0];
pos[2] <= pos[2];
bd[0] <= brd;
bd[1] <= bd[1];
bd[2] <= bd[2];
bd[3] <= bd[3];
max <= max;
best <= best;
tp[0] <= tip;
end
end
2: begin
if (pos[2] >= 64) begin
pos[1] <= pos[1] + 1;
step <= 1;
pos[0] <= pos[0];
pos[2] <= pos[2];
bd[0] <= brd;
bd[1] <= bd[1];
bd[2] <= bd[2];
bd[3] <= bd[3];
max <= max;
best <= best;
tp[0] <= tip;
end
else if (tp[2][pos[2][5:0]]) begin
bd[3] <= bd[2] + (1 << pos[2]);
step <= 3;
pos[0] <= pos[0];
pos[1] <= pos[1];
pos[2] <= pos[2];
bd[0] <= brd;
bd[1] <= bd[1];
bd[2] <= bd[2];
max <= max;
best <= best;
tp[0] <= tip;
end
else begin
pos[2] <= pos[2] + 1;
step <= 2;
pos[0] <= pos[0];
pos[1] <= pos[1];
bd[0] <= brd;
bd[1] <= bd[1];
bd[2] <= bd[2];
bd[3] <= bd[3];
max <= max;
best <= best;
tp[0] <= tip;
end
end
3: begin
if (score >= max) begin
max <= score;
best <= {pos[2][5:0],pos[1][5:0],pos[0][5:0]};
end
else begin
max <= max;
best <= best;
end
pos[2] <= pos[2] + 1;
step <= 2;
pos[0] <= pos[0];
pos[1] <= pos[1];
bd[0] <= brd;
bd[1] <= bd[1];
bd[2] <= bd[2];
bd[3] <= bd[3];
tp[0] <= tip;
end
default: begin
step <= step;
pos[0] <= pos[0];
pos[1] <= pos[1];
pos[2] <= pos[2];
bd[0] <= brd;
bd[1] <= bd[1];
bd[2] <= bd[2];
bd[3] <= bd[3];
max <= max;
best <= best;
tp[0] <= tip;
end
endcase
end
assign finish = (pos[0] >= 64);
always @(*) begin
tp[1] = 0;
for (j2 = 1; j2 < 17; j2 = j2 + 2) begin : part01
x1 = pos[0][5:3];
y1 = pos[0][2:0];
for (k2 = 0; k2 < 7; k2 = k2 + 1) begin
x1 = x1 + {dx[j2],dx[j2-1]} - 1;
y1 = y1 + {dy[j2],dy[j2-1]} - 1;
if ((x1 > 7) || (y1 > 7) || (bd[1][{x1[2:0],y1[2:0]}])) disable part01;
else tp[1][{x1[2:0],y1[2:0]}] = 1;
end
end
tp[2] = 0;
for (j2 = 1; j2 < 17; j2 = j2 + 2) begin : part02
x1 = pos[1][5:3];
y1 = pos[1][2:0];
for (k2 = 0; k2 < 7; k2 = k2 + 1) begin
x1 = x1 + {dx[j2],dx[j2-1]} - 1;
y1 = y1 + {dy[j2],dy[j2-1]} - 1;
if ((x1 > 7) || (y1 > 7) || (bd[2][{x1[2:0],y1[2:0]}])) disable part02;
else tp[2][{x1[2:0],y1[2:0]}] = 1;
end
end
end
always @(*) begin
chs[0] = pos[1];
cs = 0;
for (i3 = 0; i3 < 64; i3 = i3 + 1) if ((i3 != pos[0]) && (i3 != pos[1]) && tp[0][i3%64]) begin
cs = cs + 1;
chs[cs] = i3;
end
score = 0;
for (i3 = 0; i3 < 4; i3 = i3 + 1) begin : pa
if (i3 > cs) disable pa;
for (j3 = 1; j3 < 17; j3 = j3 + 2) begin : part03
x2 = chs[i3][5:3];
y2 = chs[i3][2:0];
for (k3 = 0; k3 < 7; k3 = k3 + 1) begin
x2 = x2 + {dx[j3],dx[j3-1]} - 1;
y2 = y2 + {dy[j3],dy[j3-1]} - 1;
if ((x2 > 7) || (y2 > 7) || (bd[3][{x2[2:0],y2[2:0]}])) disable part03;
else score = score + 1;
end
end
end
end
endmodulemodule ai_play(
input clk,
input ena,
input write,
input [17:0] play,
input [2:0] px,
input [2:0] py,
input [1:0] step,
output [2:0] od
);
reg [2:0] ods;
parameter [2:0] NULL = 3'b000,
UP = 3'b001,
DOWN = 3'b010,
LEFT = 3'b011,
RIGHT = 3'b100,
ENTER = 3'b101;
wire [5:0] pos [2:0];
assign pos[2] = play[17:12];
assign pos[1] = play[11:6];
assign pos[0] = play[5:0];
assign od = write * ods;
always @(*) begin
if (px > pos[step][5:3]) ods = UP;
else if (px < pos[step][5:3]) ods = DOWN;
else if (py > pos[step][2:0]) ods = LEFT;
else if (py < pos[step][2:0]) ods = RIGHT;
else if ({px,py} == pos[step]) ods = ENTER;
end
endmodulemodule timer(
input clk,
output p_10khz,
output p_100hz,
output p_5hz
);
reg [24:0] p5 = 0;
reg [19:0] p100 = 0;
reg [13:0] p10k = 0;
assign p_10khz = (p10k == 0);
assign p_100hz = (p100 == 0);
assign p_5hz = (p5 == 0);
always @(posedge clk) begin
if (p5 == 19999999) p5 <= 0;
else p5 <= p5 + 1;
if (p100 == 999999) p100 <= 0;
else p100 <= p100 + 1;
if (p10k == 9999) p10k <= 0;
else p10k <= p10k + 1;
end
endmodulemodule top(
input clk,
input rst_vga,
input wire btn_up,
input wire btn_down,
input wire btn_enter,
input wire btn_left,
input wire btn_right,
input wire hang,
output wire [3:0] r,
output wire [3:0] g,
output wire [3:0] b,
output wire hs,
output wire vs
);
wire [2:0] OD1;
wire [2:0] OD0;
wire ENA;
wire [2:0] C_X;
wire [2:0] C_Y;
wire [2:0] C_Z;
wire [3:0] IO;
wire RST, LINE_UP, LINE_DOWN, LINE_ENTER, WK1, WK0, ENA1, ENA0, P5, P100, P10K;
wire [63:0] BD;
wire [63:0] TP;
wire [1:0] ST;
wire [2:0] P_X;
wire [2:0] P_Y;
wire [1:0] CMD, INF, GAME_OVER, P_NUM;
button_detect U1(.bt({btn_right,btn_left,btn_down,btn_up,btn_enter}),.od(OD0),.work0(ENA0),.work1(P100),.ena(WK0),.clk(clk),
.bto({LINE_DOWN,LINE_UP,LINE_ENTER}));
single_step U2(.game_over(GAME_OVER),.od1(OD1),.od0(OD0),.wk1(WK1),.wk0(WK0),.ena1(ENA1),.ena0(ENA0),.g_x(C_X),.g_y(C_Y),.g_io(IO),
.rst(RST),.clk(clk),.p_x(P_X),.p_y(P_Y),.bd(BD),.tp(TP),.st(ST),.mode(P_NUM));
VGA_Multi U3(.cmd(CMD),.inf(INF),.clk(clk),.rst(rst_vga),.data_io(IO),.r(r),.g(g),.b(b),
.x(C_X),.y(C_Y),.hs(hs),.vs(vs));
Sys_ctrl U4(.clk(clk),.btn_up(LINE_UP),.btn_down(LINE_DOWN),.btn_enter(LINE_ENTER),.hang(hang),
.game_over(GAME_OVER),.cmd(CMD),.inf(INF),.rst(RST),.p_num(P_NUM));
ai_top U5(.CLK(clk),.WORK(ENA1),.WRITE(WK1),.PX(P_X),.PY(P_Y),.STEP(ST),.BRD(BD),.TIP(TP),.OD(OD1),
.p_5hz(P5),.p_100hz(P100),.p_10khz(P10K));
timer U6(.clk(clk),.p_5hz(P5),.p_100hz(P100),.p_10khz(P10K));
endmodule更多信息,敬请参阅工程文件附件,或联系项目开发者。