This repo contains all the necessary hardware for noah-robot.
As a final thesis project of Electronics engineering, I decided to build a robot from scratch. All the design was made in order to build the robot with parts that can be bought in Argentina.
Take a look to the other repos related to this project:

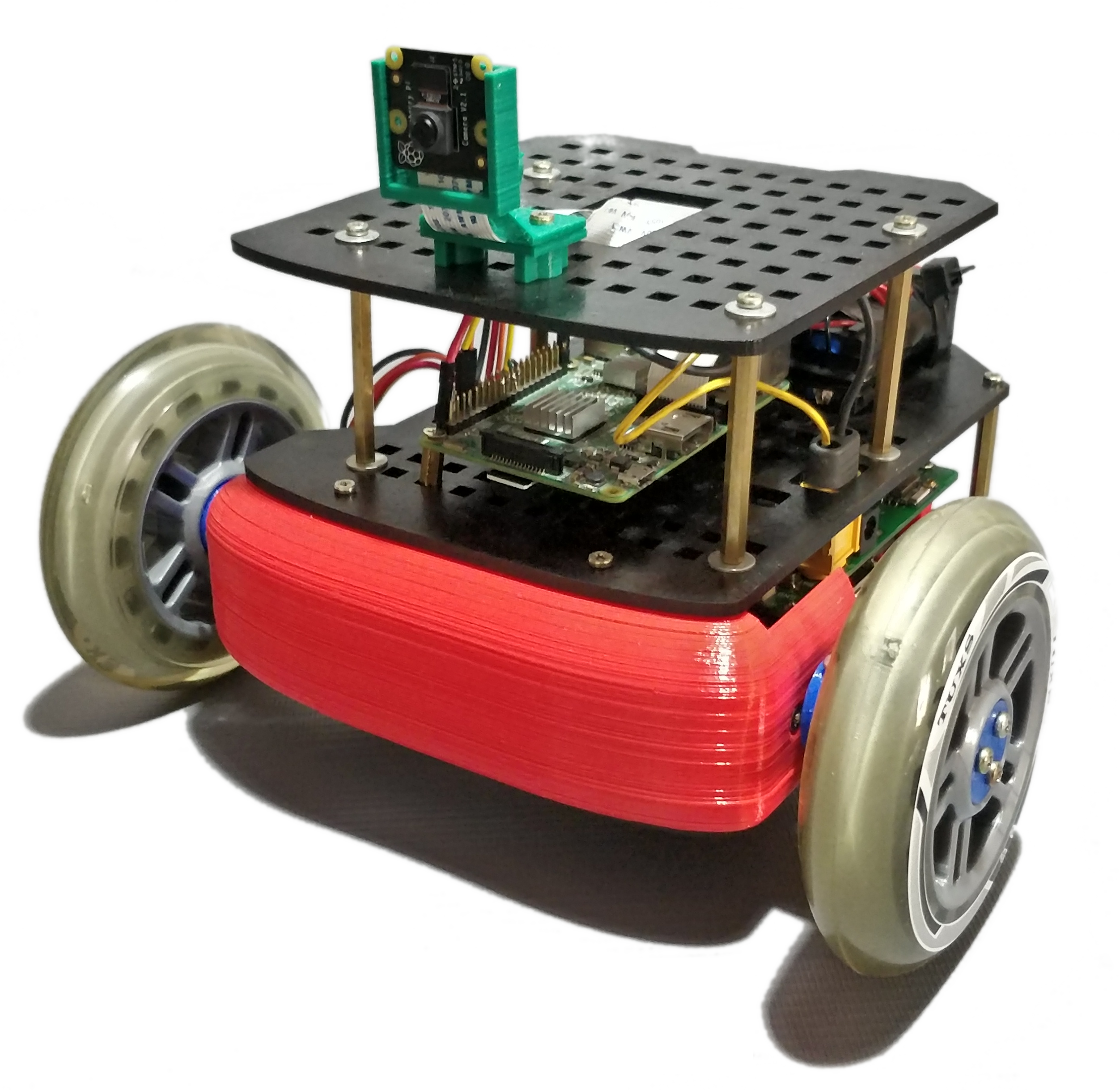
The robot is made out of 3D printed parts, some parts made with 3mm laser cut and vitamins. All the parts were designed with Solidworks. You can find those parts as well as files for construction in the 3D model section.
There are 2 versions of the robot. The Noah version which uses the noah main controller board. If you want to implement your own circuit a generic version was also designed.





The main PCB is in charge of controlling all the peripherals of the robot. You can see in the pictures a all the connectors available. Several modules were provided:
- NEO6VM - GPS
- GY91 - IMU + Compass + Barometer + Temperature sensor
- ESP07 - Wifi module
- TB6612FGN - Dual full H bridge.
At the bottom there are 4 SMPS modules installed. They are capable of delivering up to 5A per channel.
The PCB was designed with Kicad. Take a look to the PCB section.
The STM32F407VG was choseen as the main controller of this board. It runs at 72Mhz, enough to manage the 4 main FreeRTOS tasks that are currently coded:
- PID control loop for left motor.
- PID control loop for right motor.
- Comms task: provides communication between this layer and the ROS layer.
- Power management: small task in charge of managing the energy of the power supplies.
This project uses STM32CubeIde.
-
Install LFS in your machine:
git lfs install
-
clone the repo:
git clone [email protected]:GonzaCerv/noah-hardware.git
- Gonzalo Cervetti - Idea & Initial work